-
1 entry value
1) Компьютерная техника: значение ввода2) Бухгалтерия: входящая стоимость3) Вычислительная техника: входное значение -
2 input value
1) Компьютерная техника: входная величина, входное значение2) Робототехника: входная переменная3) Макаров: входящая величина4) SAP.тех. значение ввода -
3 valid entry value
SAP.тех. допустимое значение ввода -
4 cos j
7.5. Защита от короткого замыкания и прочность при коротком замыкании
Примечание. В настоящее время требования этого пункта применимы главным образом к устройствам переменного тока. Требования к устройствам постоянного тока находятся в стадии рассмотрения.
7.5.1. Общие положения
НКУ должны иметь конструкцию, способную выдерживать тепловые и электродинамические нагрузки, возникающие при значениях токов короткого замыкания, не превышающих установленных.
Примечание. Нагрузки, возникающие вследствие короткого замыкания, могут быть уменьшены при помощи токоограничивающих устройств (индуктивностей, токоограничивающих плавких предохранителей или других токоограничивающих коммутационных устройств).
НКУ должны быть защищены от токов короткого замыкания, например, автоматическими выключателями, плавкими предохранителями или тем и другим вместе, которые могут быть частью НКУ или располагаться за его пределами.
Примечание. Если НКУ предназначены для использования в системах IT*, то аппарат защиты в каждой фазе должен иметь достаточную отключающую способность относительно междуфазного напряжения при двухфазном замыкании на землю.
* См title="Электроустановки зданий. Часть 3. Основные характеристики".
Потребитель, заказывая НКУ, должен определить условия короткого замыкания на месте его установки.
Примечание. Желательно, чтобы в случае повреждения, ведущего к образованию дуги внутри НКУ, обеспечивалась максимально возможная степень защиты персонала, хотя главной целью является предупреждение образования такой дуги принятием соответствующих мер при проектировании или ограничение длительности горения дуги.
Для ЧИ НКУ рекомендуется использовать устройства, прошедшие типовые испытания, например, системы сборных шин, если на них не распространяются исключения пп. 8.2.3.1.1 - 8.2.3.1.3. В случаях, когда применение устройств, прошедших типовые испытания, не представляется возможным, прочность этих частей при коротком замыкании проверяют путем экстраполяции, исходя из устройств, испытанных в соответствии с типовыми испытаниями.
7.5.2. Сведения, касающиеся прочности при коротком замыкании
7.5.2.1. Для НКУ, в котором имеется только один блок ввода, изготовитель обязан представлять сведения о прочности при коротком замыкании следующим образом:
7.5.2.1.1. Для НКУ с устройством защиты от короткого замыкания, включенным в блок ввода, указанием максимально допустимого значения ожидаемого тока короткого замыкания на зажимах блока ввода. Эта величина не должна превышать номинальные значения (см. пп. 4.3 - 4.7). Коэффициент мощности и пиковые значения должны соответствовать указанным в п. 7.5.3.
Если устройством защиты от короткого замыкания является плавкий предохранитель, то изготовитель обязан указать характеристики плавкой вставки (номинальный ток, отключающую способность, ток отключения, I2t и т.д.).
Если используют автоматический выключатель с расцепителем, имеющим выдержку времени, то может потребоваться указание максимальной выдержки времени и значения тока уставки, соответствующих ожидаемому току короткого замыкания.
7.5.2.1.2. Для НКУ, в которых защитное устройство от короткого замыкания не входит в блок ввода, прочность при коротком замыкании указывают с помощью следующих способов (одного или нескольких):
а) номинальный кратковременно выдерживаемый ток (п. 4.3) и номинальный ударный ток (п. 4.4) вместе с соответствующим временем, если оно отличается от 1 с. Отношение пикового значения к действующему должно соответствовать указанному в табл. 5.
Примечание. Для периодов времени с максимальным значением до 3 с соотношение между кратковременно выдерживаемым током и соответствующим временем представляется формулой
i2t = const
при условии, что пиковое значение не превышает значение номинального ударного тока;
b) номинальный ожидаемый ток короткого замыкания на зажимах блока ввода НКУ, а также соответствующее время, если оно отличается от 1 с. Соотношение между пиковым и действующим значением должно быть таким, как указано в табл. 5;
с) номинальный условный ток короткого замыкания (п. 4.6);
d) номинальный ток короткого замыкания, отключаемый плавким предохранителем (п. 4.7).
Для подпунктов с) и d) изготовитель обязан указывать характеристики (номинальный ток, отключающая способность, ток отключения, I2t и т.д.) токоограничивающих коммутационных устройств (например, автоматических выключателей или плавких предохранителей), необходимых для защиты НКУ.
Примечание. При замене плавких вставок должны использоваться вставки с такими же характеристиками.
7.5.2.2. Для НКУ с несколькими блоками ввода, одновременная работа которых маловероятна, прочность при коротком замыкании может указываться для каждого из блоков в соответствии с п. 7.5.2.1.
7.5.2.3. Для НКУ с несколькими блоками ввода, которые могут работать одновременно, а также для НКУ с одним блоком ввода и одним или несколькими блоками вывода для вращающихся машин большой мощности, могущих повлиять на величину тока короткого замыкания, должно быть заключено специальное соглашение о величинах ожидаемого тока короткого замыкания в каждом блоке ввода или вывода и на шинах.
7.5.3. Зависимость между пиковыми и действующим и значениями тока короткого замыкания
Пиковое значение тока короткого замыкания (пиковое значение первой волны тока короткого замыкания, включая постоянную составляющую) для определения электродинамических усилий, получается умножением действующего значения тока короткого замыкания на коэффициент п. Стандартные значения коэффициента n и соответствующего коэффициента мощности даны в табл. 5.
Таблица 5
Действующее значение тока короткого замыкания
cos j
n
I £ 5 кА
0,7
1,5
5 кА < I £ 10 кА
0,5
1,7
10 кА < I £ 20 кА
0,3
2
20 кА < I £ 50 кА
0,25
2,1
50 кА < I
0,2
2,2
Примечание. Значения, приведенные в табл. 5, соответствуют большинству случаев применения. В специальных местах, например, вблизи трансформаторов или генераторов, коэффициент мощности может иметь более низкие значения; таким образом, максимальное пиковое значение ожидаемого тока станет предельным значением вместо действующего значения тока короткого замыкания.
7.5.4. Координация устройств защиты от короткого замыкания
7.5.4.1. Координация устройств защиты должна являться предметом согласования между потребителем и изготовителем. Вместо такого соглашения можно использовать сведения, приводимые в каталоге предприятия-изготовителя.
7.5.4.2. Если по условиям эксплуатации необходима непрерывность питания, то уставки или выбор устройств защиты от короткого замыкания внутри НКУ должны производиться таким образом, чтобы короткое замыкание, возникающее в любой отходящей цепи ответвления, могло быть устранено с помощью отключающего устройства, установленного в поврежденной цепи ответвления без какого-либо воздействия на другие отходящие ответвления, чем гарантируется селективность системы защиты.
7.5.5. Внутренние цепи НКУ
7.5.5.1. Главные цепи
7.5.5.1.1. Шины (оголенные или с изоляцией) должны располагаться таким образом, чтобы при нормальных условиях эксплуатации исключалась возможность внутреннего короткого замыкания. При отсутствии других указаний их выбирают согласно сведениям о прочности при коротком замыкании (п. 7.5.2) и должны выдерживать по крайней мере воздействия коротких замыканий, ограниченных устройствами защиты на стороне подачи питания на шины.
7.5.5.1.2. Проводники между главными шинами и стороной питания отдельного функционального блока, также как и комплектующие, входящие в этот блок, могут быть выбраны, исходя из уменьшенных воздействий короткого замыкания со стороны присоединения нагрузки к устройству защиты от короткого замыкания в этом блоке, при условии такого расположения этих проводников, при котором в нормальных рабочих условиях внутреннее короткое замыкание между фазами и/или между фазами и землей является маловероятным, например, если проводники имеют соответствующую изоляцию или оболочку. Это также относится к проводникам со стороны питания отдельных функциональных блоков внутри НКУ, не содержащих главных шин.
7.5.5.2. Вспомогательные цепи
Обычно вспомогательные цепи должны быть защищены от воздействия коротких замыканий. Однако защитное устройство, предохраняющее от короткого замыкания, не следует применять в случае, если его срабатывание может иметь опасные последствия. В этом случае проводники вспомогательных цепей должны располагаться таким образом, чтобы в нормальных условиях работы исключалась возможность возникновения короткого замыкания.
Источник: ГОСТ 28668-90 Э: Низковольтные комплектные устройства распределения и управления. Часть 1. Требования к устройствам, испытанным полностью или частично оригинал документа
Англо-русский словарь нормативно-технической терминологии > cos j
-
5 valuator
- устройство ввода чисел, скалярных величин (в интерактивной графике)
- устройство ввода чисел
устройство ввода чисел
Устройство ввода, предоставляющее значение скалярной величины.
Примечание
К таким устройствам относится устройство типа "колесо", потенциометр
[ ГОСТ 27459-87]Тематики
EN
устройство ввода чисел, скалярных величин (в интерактивной графике)
Устройство ввода, представляющее значение скалярной величины. К таким устройствам относят устройство типа «колесо», потенциометр. Реализуется также в виде клавиатуры, в виде линейки на экране дисплея, на которой курсором указывается позиция, или отдельным устройством.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
Valuator
Устройство ввода, предоставляющее значение скалярной величины.
Примечание. К таким устройствам относится устройство типа «колесо», потенциометр
Источник: ГОСТ 27459-87: Системы обработки информации. Машинная графика. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > valuator
-
6 generic object oriented substation event
- широковещательное объектно-ориентированное сообщение о событии на подстанции
GOOSE-сообщение
-
[Интент]
широковещательное объектно-ориентированное сообщение о событии на подстанции
Широковещательный высокоскоростной внеочередной отчет, содержащий статус каждого из входов, устройств пуска, элементов выхода и реле, реальных и виртуальных.
Примечание. Этот отчет выдается многократно последовательно, как правило, сразу после первого отчета с интервалами 2, 4, 8,…, 60000 мс. Значение задержки первого повторения является конфигурируемым. Такой отчет обеспечивает выдачу высокоскоростных сигналов отключения с высокой вероятностью доставки.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]
общие объектно-ориентированные события на подстанции
-
[ ГОСТ Р МЭК 61850-7-2-2009]
GOOSE
Generic Object Oriented Substation Event (стандарт МЭК 61850-8-1)
Протокол передачи данных о событиях на подстанции.
Один из трех протоколов передачи данных, предлагаемых к использованию в МЭК 61850.
Фактически данный протокол служит для замены медных кабельных связей, предназначенных для передачи дискретных сигналов между устройствами.
[ Цифровые подстанции. Проблемы внедрения устройств РЗА]EN
generic object oriented substation event
on the occurrence of any change of state, an IED will multicast a high speed, binary object, Generic Object Oriented Substation Event (GOOSE) report by exception, typically containing the double command state of each of its status inputs, starters, output elements and relays, actual and virtual.
This report is re-issued sequentially, typically after the first report, again at intervals of 2, 4, 8…60000 ms. (The first repetition delay value is an open value it may be either shorter or longer).
A GOOSE report enables high speed trip signals to be issued with a high probability of delivery
[IEC 61850-2, ed. 1.0 (2003-08)]До недавнего времени для передачи дискретных сигналов между терминалами релейной защиты и автоматики (РЗА) использовались дискретные входы и выходные реле. Передача сигнала при этом осуществляется подачей оперативного напряжения посредством замыкания выходного реле одного терминала на дискретный вход другого терминала (далее такой способ передачи будем называть традиционным).
Такой способ передачи информации имеет следующие недостатки:- необходимо большое количество контрольных кабелей, проложенных между шкафами РЗА,
- терминалы РЗА должны иметь большое количество дискретных входов и выходных реле,
- количество передаваемых сигналов ограничивается определенным количеством дискретных входов и выходных реле,
- отсутствие контроля связи между терминалами РЗА,
- возможность ложного срабатывания дискретного входа при замыкании на землю в цепи передачи сигнала.
Информационные технологии уже давно предоставляли возможность для передачи информации между микропроцессорными терминалами по цифровой сети. Разработанный недавно стандарт МЭК 61850 предоставил такую возможность для передачи сигналов между терминалами РЗА.
Стандарт МЭК 61850 использует для передачи данных сеть Ethernet. Внутри стандарта МЭК 61850 предусмотрен такой механизм, как GOOSE-сообщения, которые и используются для передачи сообщений между терминалами РЗА.
Принцип передачи GOOSE-сообщений показан на рис. 1.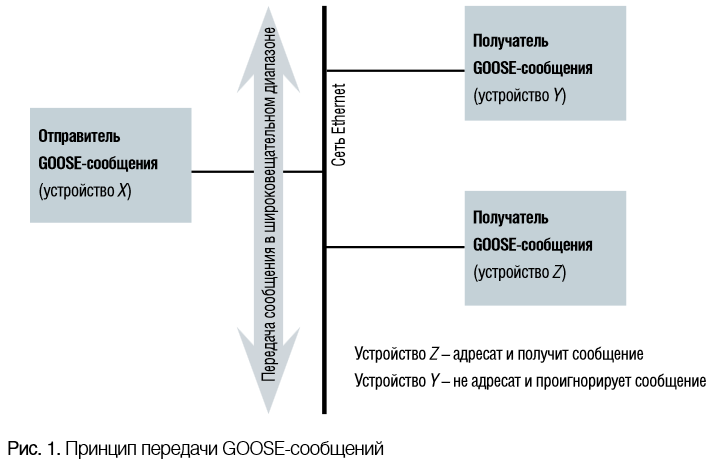
Устройство-отправитель передает по сети Ethernet информацию в широковещательном диапазоне.
В сообщении присутствует адрес отправителя и адреса, по которым осуществляется его передача, а также значение сигнала (например «0» или «1»).
Устройство-получатель получит сообщение, а все остальные устройства его проигнорируют.
Поскольку передача GOOSE-сообщений осуществляется в широковещательном диапазоне, т.е. нескольким адресатам, подтверждение факта получения адресатами сообщения отсутствует. По этой причине передача GOOSE-сообщений в установившемся режиме производится с определенной периодичностью.
При наступлении нового события в системе (например, КЗ и, как следствие, пуска измерительных органов защиты) начинается спонтанная передача сообщения через увеличивающиеся интервалы времени (например, 1 мс, 2 мс, 4 мс и т.д.). Интервалы времени между передаваемыми сообщениями увеличиваются, пока не будет достигнуто предельное значение, определяемое пользователем (например, 50 мс). Далее, до момента наступления нового события в системе, передача будет осуществляется именно с таким периодом. Указанное проиллюстрировано на рис. 2.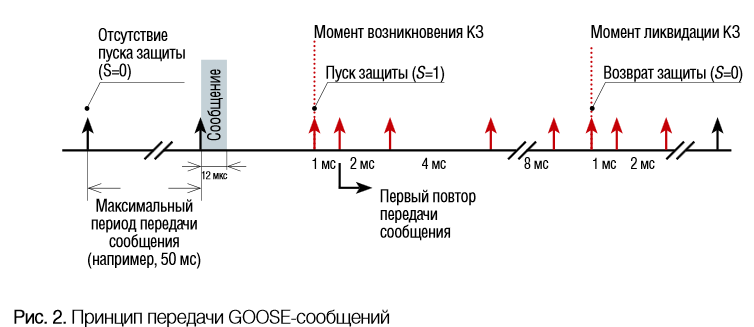
Технология повторной передачи не только гарантирует получение адресатом сообщения, но также обеспечивает контроль исправности линии связи и устройств – любые неисправности будут обнаружены по истечении максимального периода передачи GOOSE-сообщений (с точки зрения эксплуатации практически мгновенно). В случае передачи сигналов традиционным образом неисправность выявляется либо в процессе плановой проверки устройств, либо в случае неправильной работы системы РЗА.
Еще одной особенностью передачи GOOSE-сообщений является использование функций установки приоритетности передачи телеграмм (priority tagging) стандарта Ethernet IEEE 802.3u, которые не используются в других протоколах, в том числе уровня TCP/IP. То есть GOOSE-сообщения идут в обход «нормальных» телеграмм с более высоким приоритетом (см. рис. 3).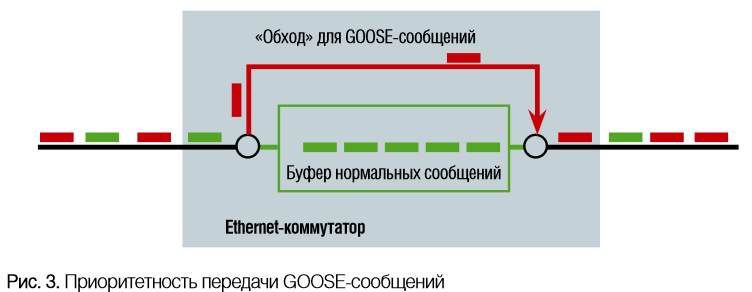
Однако стандарт МЭК 61850 декларирует передачу не только дискретной информации между терминалами РЗА, но и аналоговой. Это означает, что в будущем будет иметься возможность передачи аналоговой информации от ТТ и ТН по цифровым каналам связи. На данный момент готовых решений по передаче аналоговой информации для целей РЗА (в рамках стандарта МЭК 61850) ни один из производителей не предоставляет.
Для того чтобы использовать GOOSE-сообщения для передачи дискретных сигналов между терминалами РЗА необходима достаточная надежность и быстродействие передачи GOOSE-сообщений. Надежность передачи GOOSE-сообщений обеспечивается следующим:- Протокол МЭК 61850 использует Ethernet-сеть, за счет этого выход из строя верхнего уровня АСУ ТП и любого из устройств РЗА не отражается на передаче GOOSE-сообщений оставшихся в работе устройств,
- Терминалы РЗА имеют два независимых Ethernet-порта, при выходе одного из них из строя второй его полностью заменяет,
- Сетевые коммутаторы, к которым подключаются устройства РЗА, соединяются в два независимых «кольца»,
- Разные порты одного терминала РЗА подключаются к разным сетевым коммутаторам, подключенным к разным «кольцам»,
- Каждый сетевой коммутатор имеет дублированное питание от разных источников,
- Во всех устройствах РЗА осуществляется постоянный контроль возможности прохождения каждого сигнала. Это позволяет автоматически определить не только отказы цифровой связи, но и ошибки параметрирования терминалов.
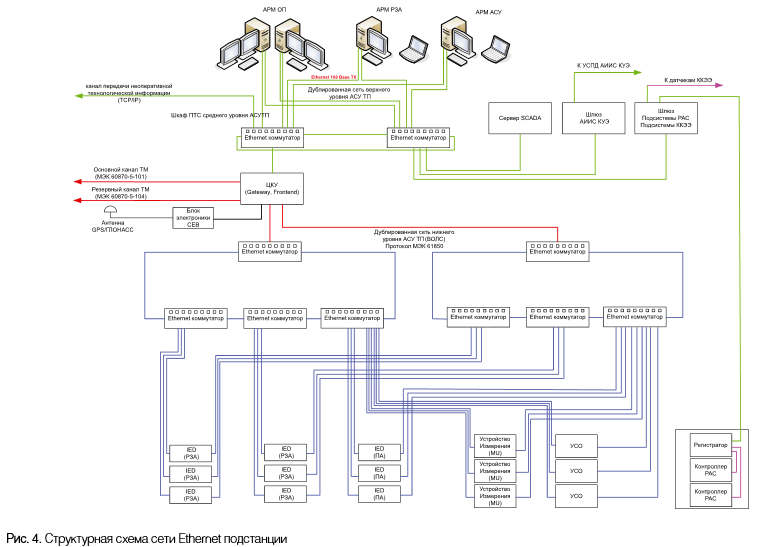
На рис. 4 изображен пример структурной схемы сети Ethernet (100 Мбит/c) подстанции. Отказ в передаче GOOSE-сообщения от одного устройства защиты другому возможен в результате совпадения как минимум двух событий. Например, одновременный отказ двух коммутаторов, к которым подключено одно устройство или одновременный отказ обоих портов одного устройства. Могут быть и более сложные отказы, связанные с одновременным наложением большего количества событий. Таким образом, единичные отказы оборудования не могут привести к отказу передачи GOOSEсообщений. Дополнительно увеличивает надежность то обстоятельство, что даже в случае отказа в передаче GOOSE-сообщения, устройство, принимающее сигнал, выдаст сигнал неисправности, и персонал примет необходимые меры для ее устранения.
Быстродействие.
В соответствии с требованиями стандарта МЭК 61850 передача GOOSE-сообщений должна осуществляться со временем не более 4 мс (для сообщений, требующих быстрой передачи, например, для передачи сигналов срабатывания защит, пусков АПВ и УРОВ и т.п.). Вообще говоря, время передачи зависит от топологии сети, количества устройств в ней, загрузки сети и загрузки вычислительных ресурсов терминалов РЗА, версии операционной системы терминала, коммуникационного модуля, типа центрального процессора терминала, количества коммутаторов и некоторых других аспектов. Поэтому время передачи GOOSE-сообщений должно быть подтверждено опытом эксплуатации.
Используя для передачи дискретных сигналов GOOSE-сообщения необходимо обращать внимание на то обстоятельство, что при использовании аппаратуры некоторых производителей, в случае отказа линии связи, значение передаваемого сигнала может оставаться таким, каким оно было получено в момент приема последнего сообщения.
Однако при отказе связи бывают случаи, когда сигнал должен принимать определенное значение. Например, значение сигнала блокировки МТЗ ввода 6–10 кВ в логике ЛЗШ при отказе связи целесообразно установить в значение «1», чтобы при КЗ на отходящем присоединении не произошло ложного отключения ввода. Так, к примеру, при проектировании терминалов фирмы Siemens изменить значение сигнала при отказе связи возможно с помощью свободно-программируемой CFCлогики (см. рис. 5).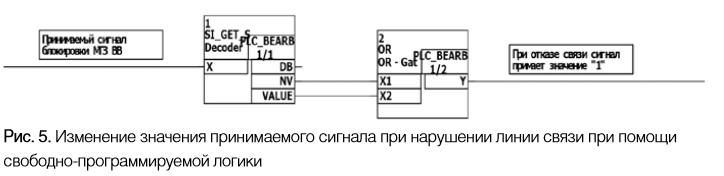
К CFC-блоку SI_GET_STATUS подводится принимаемый сигнал, на выходе блока мы можем получить значение сигнала «Value» и его статус «NV». Если в течение определенного времени не поступит сообщение со значением сигнала, статус сигнала «NV» примет значение «1». Далее статус сигнала и значение сигнала подводятся к элементу «ИЛИ», на выходе которого будет получено значение сигнала при исправности линии связи или «1» при нарушении исправности линии связи. Изменив логику, можно установить значение сигнала равным «0» при обрыве связи.
Использование GOOSE-сообщений предъявляет специальные требования к наладке и эксплуатации устройств РЗА. Во многом процесс наладки становится проще, однако при выводе устройства из работы необходимо следить не только за выводом традиционных цепей, но и не забывать отключать передачу GOOSE-сообщений.
При изменении параметрирования одного устройства РЗА необходимо производить загрузку файла параметров во все устройства, с которыми оно было связано.
В нашей стране имеется опыт внедрения и эксплуатации систем РЗА с передачей дискретных сигналов с использованием GOOSE-сообщений. На первых объектах GOOSE-сообщения использовались ограниченно (ПС 500 кВ «Алюминиевая»).
На ПС 500 кВ «Воронежская» GOOSEсообщения использовались для передачи сигналов пуска УРОВ, пуска АПВ, запрета АПВ, действия УРОВ на отключение смежного элемента, положения коммутационных аппаратов, наличия/отсутствия напряжения, сигналы ЛЗШ, АВР и т.п. Кроме того, на ОРУ 500 кВ и 110 кВ ПС «Воронежская» были установлены полевые терминалы, в которые собиралась информация с коммутационного оборудования и другая дискретная информация с ОРУ (рис. 6). Далее информация с помощью GOOSE-сообщений передавалась в терминалы РЗА, установленные в ОПУ подстанции (рис. 7, 8).
GOOSE-сообщения также были использованы при проектировании уже введенных в эксплуатацию ПС 500 кВ «Бескудниково», ПС 750 кВ «Белый Раст», ПС 330кВ «Княжегубская», ПС 220 кВ «Образцово», ПС 330 кВ «Ржевская». Эта технология применяется и при проектировании строящихся и модернизируемых подстанций ПС 500 кВ «Чагино», ПС 330кВ «Восточная», ПС 330 кВ «Южная», ПС 330 кВ «Центральная», ПС
330 кВ «Завод Ильич» и многих других.
Основные преимущества использования GOOSE-сообщений:- позволяет снизить количество кабелей вторичной коммутации на ПС;
- обеспечивает лучшую помехозащищенность канала связи;
- позволяет снизить время монтажных и пусконаладочных работ;
- исключает проблему излишнего срабатывания дискретных входов терминалов из-за замыканий на землю в цепях оперативного постоянного тока;
- убирает зависимость количества передаваемых сигналов от количества дискретных входов и выходных реле терминалов;
- обеспечивает возможность реконструкции и изменения связей между устройствами РЗА без прокладки дополнительных кабельных связей и повторного монтажа в шкафах;
- позволяет использовать МП терминалы РЗА с меньшим количеством входов и выходов (уменьшение габаритов и стоимости устройства);
- позволяет контролировать возможность прохождения сигнала (увеличивается надежность).
Безусловно, для окончательных выводов должен появиться достаточный опыт эксплуатации. В настоящее время большинство производителей устройств РЗА заявили о возможности использования GOOSEсообщений. Стандарт МЭК 61850 определяет передачу GOOSE-сообщений между терминалами разных производителей. Использование GOOSE-сообщений для передачи дискретных сигналов – это качественный скачок в развитии систем РЗА. С развитием стандарта МЭК 61850, переходом на Ethernet 1 Гбит/сек, с появлением новых цифровых ТТ и ТН, новых выключателей с возможностью подключения их блока управления к шине процесса МЭК 61850, эффективность использования GOOSE-сообщений намного увеличится. Облик будущих подстанций представляется с минимальным количеством контрольных кабелей, с передачей всех сообщений между устройствами РЗА, ТТ, ТН, коммутационными аппаратами через цифровую сеть. Устройства РЗА будут иметь минимальное количество выходных реле и дискретных входов
[ http://romvchvlcomm.pbworks.com/f/goosepaper1.pdf]
В стандарте определены два способа передачи данных напрямую между устройствами: GOOSE и GSSE. Это тоже пример наличия двух способов для реализации одной функции. GOOSE - более новый способ передачи сообщений, разработан специально для МЭК 61850. Способ передачи сообщений GSSE ранее присутствовал в стандарте UCA 2.0, являющимся одним из предшественников МЭК 61850. По сравнению с GSSE, GOOSE имеет более простой формат (Ethernet против стека OSI протоколов) и возможность передачи различных типов данных. Вероятно, способ GSSE включили в МЭК 61850 для того, чтобы производители, имеющие в своих устройствах протокол UCA 2.0, могли сразу декларировать соответствие МЭК 61850. В настоящее время все производители используют только GOOSE для передачи сообщений между устройствами.
Для выбора списка передаваемых данных в GOOSE, как и в отчѐтах, используются наборы данных. Однако тут требования уже другие. Время обработки GOOSE-сообщений должно быть минимальным, поэтому логично передавать наиболее простые типы данных. Обычно передаѐтся само значение сигнала и в некоторых случаях добавляется поле качества. Метка времени обычно включается в набор данных.
...
В устройствах серии БЭ2704 в передаваемых GOOSE-сообщениях содержатся данные типа boolean. Приниматься могут данные типа boolean, dbpos, integer.
Устоявшаяся тенденция существует только для передачи дискретной информации. Аналоговые данные пока передают немногие производители, и поэтому устоявшаяся тенденция в передаче аналоговой информации в данный момент отсутствует.
[ Источник]
Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > generic object oriented substation event
-
7 GOOSE
- широковещательное объектно-ориентированное сообщение о событии на подстанции
GOOSE-сообщение
-
[Интент]
широковещательное объектно-ориентированное сообщение о событии на подстанции
Широковещательный высокоскоростной внеочередной отчет, содержащий статус каждого из входов, устройств пуска, элементов выхода и реле, реальных и виртуальных.
Примечание. Этот отчет выдается многократно последовательно, как правило, сразу после первого отчета с интервалами 2, 4, 8,…, 60000 мс. Значение задержки первого повторения является конфигурируемым. Такой отчет обеспечивает выдачу высокоскоростных сигналов отключения с высокой вероятностью доставки.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]
общие объектно-ориентированные события на подстанции
-
[ ГОСТ Р МЭК 61850-7-2-2009]
GOOSE
Generic Object Oriented Substation Event (стандарт МЭК 61850-8-1)
Протокол передачи данных о событиях на подстанции.
Один из трех протоколов передачи данных, предлагаемых к использованию в МЭК 61850.
Фактически данный протокол служит для замены медных кабельных связей, предназначенных для передачи дискретных сигналов между устройствами.
[ Цифровые подстанции. Проблемы внедрения устройств РЗА]EN
generic object oriented substation event
on the occurrence of any change of state, an IED will multicast a high speed, binary object, Generic Object Oriented Substation Event (GOOSE) report by exception, typically containing the double command state of each of its status inputs, starters, output elements and relays, actual and virtual.
This report is re-issued sequentially, typically after the first report, again at intervals of 2, 4, 8…60000 ms. (The first repetition delay value is an open value it may be either shorter or longer).
A GOOSE report enables high speed trip signals to be issued with a high probability of delivery
[IEC 61850-2, ed. 1.0 (2003-08)]До недавнего времени для передачи дискретных сигналов между терминалами релейной защиты и автоматики (РЗА) использовались дискретные входы и выходные реле. Передача сигнала при этом осуществляется подачей оперативного напряжения посредством замыкания выходного реле одного терминала на дискретный вход другого терминала (далее такой способ передачи будем называть традиционным).
Такой способ передачи информации имеет следующие недостатки:- необходимо большое количество контрольных кабелей, проложенных между шкафами РЗА,
- терминалы РЗА должны иметь большое количество дискретных входов и выходных реле,
- количество передаваемых сигналов ограничивается определенным количеством дискретных входов и выходных реле,
- отсутствие контроля связи между терминалами РЗА,
- возможность ложного срабатывания дискретного входа при замыкании на землю в цепи передачи сигнала.
Информационные технологии уже давно предоставляли возможность для передачи информации между микропроцессорными терминалами по цифровой сети. Разработанный недавно стандарт МЭК 61850 предоставил такую возможность для передачи сигналов между терминалами РЗА.
Стандарт МЭК 61850 использует для передачи данных сеть Ethernet. Внутри стандарта МЭК 61850 предусмотрен такой механизм, как GOOSE-сообщения, которые и используются для передачи сообщений между терминалами РЗА.
Принцип передачи GOOSE-сообщений показан на рис. 1.Устройство-отправитель передает по сети Ethernet информацию в широковещательном диапазоне.
В сообщении присутствует адрес отправителя и адреса, по которым осуществляется его передача, а также значение сигнала (например «0» или «1»).
Устройство-получатель получит сообщение, а все остальные устройства его проигнорируют.
Поскольку передача GOOSE-сообщений осуществляется в широковещательном диапазоне, т.е. нескольким адресатам, подтверждение факта получения адресатами сообщения отсутствует. По этой причине передача GOOSE-сообщений в установившемся режиме производится с определенной периодичностью.
При наступлении нового события в системе (например, КЗ и, как следствие, пуска измерительных органов защиты) начинается спонтанная передача сообщения через увеличивающиеся интервалы времени (например, 1 мс, 2 мс, 4 мс и т.д.). Интервалы времени между передаваемыми сообщениями увеличиваются, пока не будет достигнуто предельное значение, определяемое пользователем (например, 50 мс). Далее, до момента наступления нового события в системе, передача будет осуществляется именно с таким периодом. Указанное проиллюстрировано на рис. 2.Технология повторной передачи не только гарантирует получение адресатом сообщения, но также обеспечивает контроль исправности линии связи и устройств – любые неисправности будут обнаружены по истечении максимального периода передачи GOOSE-сообщений (с точки зрения эксплуатации практически мгновенно). В случае передачи сигналов традиционным образом неисправность выявляется либо в процессе плановой проверки устройств, либо в случае неправильной работы системы РЗА.
Еще одной особенностью передачи GOOSE-сообщений является использование функций установки приоритетности передачи телеграмм (priority tagging) стандарта Ethernet IEEE 802.3u, которые не используются в других протоколах, в том числе уровня TCP/IP. То есть GOOSE-сообщения идут в обход «нормальных» телеграмм с более высоким приоритетом (см. рис. 3).
Однако стандарт МЭК 61850 декларирует передачу не только дискретной информации между терминалами РЗА, но и аналоговой. Это означает, что в будущем будет иметься возможность передачи аналоговой информации от ТТ и ТН по цифровым каналам связи. На данный момент готовых решений по передаче аналоговой информации для целей РЗА (в рамках стандарта МЭК 61850) ни один из производителей не предоставляет.
Для того чтобы использовать GOOSE-сообщения для передачи дискретных сигналов между терминалами РЗА необходима достаточная надежность и быстродействие передачи GOOSE-сообщений. Надежность передачи GOOSE-сообщений обеспечивается следующим:- Протокол МЭК 61850 использует Ethernet-сеть, за счет этого выход из строя верхнего уровня АСУ ТП и любого из устройств РЗА не отражается на передаче GOOSE-сообщений оставшихся в работе устройств,
- Терминалы РЗА имеют два независимых Ethernet-порта, при выходе одного из них из строя второй его полностью заменяет,
- Сетевые коммутаторы, к которым подключаются устройства РЗА, соединяются в два независимых «кольца»,
- Разные порты одного терминала РЗА подключаются к разным сетевым коммутаторам, подключенным к разным «кольцам»,
- Каждый сетевой коммутатор имеет дублированное питание от разных источников,
- Во всех устройствах РЗА осуществляется постоянный контроль возможности прохождения каждого сигнала. Это позволяет автоматически определить не только отказы цифровой связи, но и ошибки параметрирования терминалов.
На рис. 4 изображен пример структурной схемы сети Ethernet (100 Мбит/c) подстанции. Отказ в передаче GOOSE-сообщения от одного устройства защиты другому возможен в результате совпадения как минимум двух событий. Например, одновременный отказ двух коммутаторов, к которым подключено одно устройство или одновременный отказ обоих портов одного устройства. Могут быть и более сложные отказы, связанные с одновременным наложением большего количества событий. Таким образом, единичные отказы оборудования не могут привести к отказу передачи GOOSEсообщений. Дополнительно увеличивает надежность то обстоятельство, что даже в случае отказа в передаче GOOSE-сообщения, устройство, принимающее сигнал, выдаст сигнал неисправности, и персонал примет необходимые меры для ее устранения.
Быстродействие.
В соответствии с требованиями стандарта МЭК 61850 передача GOOSE-сообщений должна осуществляться со временем не более 4 мс (для сообщений, требующих быстрой передачи, например, для передачи сигналов срабатывания защит, пусков АПВ и УРОВ и т.п.). Вообще говоря, время передачи зависит от топологии сети, количества устройств в ней, загрузки сети и загрузки вычислительных ресурсов терминалов РЗА, версии операционной системы терминала, коммуникационного модуля, типа центрального процессора терминала, количества коммутаторов и некоторых других аспектов. Поэтому время передачи GOOSE-сообщений должно быть подтверждено опытом эксплуатации.
Используя для передачи дискретных сигналов GOOSE-сообщения необходимо обращать внимание на то обстоятельство, что при использовании аппаратуры некоторых производителей, в случае отказа линии связи, значение передаваемого сигнала может оставаться таким, каким оно было получено в момент приема последнего сообщения.
Однако при отказе связи бывают случаи, когда сигнал должен принимать определенное значение. Например, значение сигнала блокировки МТЗ ввода 6–10 кВ в логике ЛЗШ при отказе связи целесообразно установить в значение «1», чтобы при КЗ на отходящем присоединении не произошло ложного отключения ввода. Так, к примеру, при проектировании терминалов фирмы Siemens изменить значение сигнала при отказе связи возможно с помощью свободно-программируемой CFCлогики (см. рис. 5).К CFC-блоку SI_GET_STATUS подводится принимаемый сигнал, на выходе блока мы можем получить значение сигнала «Value» и его статус «NV». Если в течение определенного времени не поступит сообщение со значением сигнала, статус сигнала «NV» примет значение «1». Далее статус сигнала и значение сигнала подводятся к элементу «ИЛИ», на выходе которого будет получено значение сигнала при исправности линии связи или «1» при нарушении исправности линии связи. Изменив логику, можно установить значение сигнала равным «0» при обрыве связи.
Использование GOOSE-сообщений предъявляет специальные требования к наладке и эксплуатации устройств РЗА. Во многом процесс наладки становится проще, однако при выводе устройства из работы необходимо следить не только за выводом традиционных цепей, но и не забывать отключать передачу GOOSE-сообщений.
При изменении параметрирования одного устройства РЗА необходимо производить загрузку файла параметров во все устройства, с которыми оно было связано.
В нашей стране имеется опыт внедрения и эксплуатации систем РЗА с передачей дискретных сигналов с использованием GOOSE-сообщений. На первых объектах GOOSE-сообщения использовались ограниченно (ПС 500 кВ «Алюминиевая»).
На ПС 500 кВ «Воронежская» GOOSEсообщения использовались для передачи сигналов пуска УРОВ, пуска АПВ, запрета АПВ, действия УРОВ на отключение смежного элемента, положения коммутационных аппаратов, наличия/отсутствия напряжения, сигналы ЛЗШ, АВР и т.п. Кроме того, на ОРУ 500 кВ и 110 кВ ПС «Воронежская» были установлены полевые терминалы, в которые собиралась информация с коммутационного оборудования и другая дискретная информация с ОРУ (рис. 6). Далее информация с помощью GOOSE-сообщений передавалась в терминалы РЗА, установленные в ОПУ подстанции (рис. 7, 8).
GOOSE-сообщения также были использованы при проектировании уже введенных в эксплуатацию ПС 500 кВ «Бескудниково», ПС 750 кВ «Белый Раст», ПС 330кВ «Княжегубская», ПС 220 кВ «Образцово», ПС 330 кВ «Ржевская». Эта технология применяется и при проектировании строящихся и модернизируемых подстанций ПС 500 кВ «Чагино», ПС 330кВ «Восточная», ПС 330 кВ «Южная», ПС 330 кВ «Центральная», ПС
330 кВ «Завод Ильич» и многих других.
Основные преимущества использования GOOSE-сообщений:- позволяет снизить количество кабелей вторичной коммутации на ПС;
- обеспечивает лучшую помехозащищенность канала связи;
- позволяет снизить время монтажных и пусконаладочных работ;
- исключает проблему излишнего срабатывания дискретных входов терминалов из-за замыканий на землю в цепях оперативного постоянного тока;
- убирает зависимость количества передаваемых сигналов от количества дискретных входов и выходных реле терминалов;
- обеспечивает возможность реконструкции и изменения связей между устройствами РЗА без прокладки дополнительных кабельных связей и повторного монтажа в шкафах;
- позволяет использовать МП терминалы РЗА с меньшим количеством входов и выходов (уменьшение габаритов и стоимости устройства);
- позволяет контролировать возможность прохождения сигнала (увеличивается надежность).
Безусловно, для окончательных выводов должен появиться достаточный опыт эксплуатации. В настоящее время большинство производителей устройств РЗА заявили о возможности использования GOOSEсообщений. Стандарт МЭК 61850 определяет передачу GOOSE-сообщений между терминалами разных производителей. Использование GOOSE-сообщений для передачи дискретных сигналов – это качественный скачок в развитии систем РЗА. С развитием стандарта МЭК 61850, переходом на Ethernet 1 Гбит/сек, с появлением новых цифровых ТТ и ТН, новых выключателей с возможностью подключения их блока управления к шине процесса МЭК 61850, эффективность использования GOOSE-сообщений намного увеличится. Облик будущих подстанций представляется с минимальным количеством контрольных кабелей, с передачей всех сообщений между устройствами РЗА, ТТ, ТН, коммутационными аппаратами через цифровую сеть. Устройства РЗА будут иметь минимальное количество выходных реле и дискретных входов
[ http://romvchvlcomm.pbworks.com/f/goosepaper1.pdf]
В стандарте определены два способа передачи данных напрямую между устройствами: GOOSE и GSSE. Это тоже пример наличия двух способов для реализации одной функции. GOOSE - более новый способ передачи сообщений, разработан специально для МЭК 61850. Способ передачи сообщений GSSE ранее присутствовал в стандарте UCA 2.0, являющимся одним из предшественников МЭК 61850. По сравнению с GSSE, GOOSE имеет более простой формат (Ethernet против стека OSI протоколов) и возможность передачи различных типов данных. Вероятно, способ GSSE включили в МЭК 61850 для того, чтобы производители, имеющие в своих устройствах протокол UCA 2.0, могли сразу декларировать соответствие МЭК 61850. В настоящее время все производители используют только GOOSE для передачи сообщений между устройствами.
Для выбора списка передаваемых данных в GOOSE, как и в отчѐтах, используются наборы данных. Однако тут требования уже другие. Время обработки GOOSE-сообщений должно быть минимальным, поэтому логично передавать наиболее простые типы данных. Обычно передаѐтся само значение сигнала и в некоторых случаях добавляется поле качества. Метка времени обычно включается в набор данных.
...
В устройствах серии БЭ2704 в передаваемых GOOSE-сообщениях содержатся данные типа boolean. Приниматься могут данные типа boolean, dbpos, integer.
Устоявшаяся тенденция существует только для передачи дискретной информации. Аналоговые данные пока передают немногие производители, и поэтому устоявшаяся тенденция в передаче аналоговой информации в данный момент отсутствует.
[ Источник]
Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > GOOSE
-
8 lead acid battery
свинцово-кислотная аккумуляторная батарея
Аккумуляторная батарея, в которой электроды изготовлены главным образом из свинца, а электролит представляет собой раствор серной кислоты.
[Инструкция по эксплуатации стационарных свинцово-кислотных аккумуляторных батарей в составе ЭПУ на объектах ВСС России. Москва 1998 г.]
Свинцово-кислотные аккумуляторы для стационарного оборудования связиО. Чекстер, И. Джосан
Источник: http://www.solarhome.ru/biblio/accu/chekster.htm
При организации электропитания аппаратуры связи широкое применение находят аккумуляторные установки: их применяют для обеспечения бесперебойности и надлежащего качества электропитания оборудования связи, в том числе при перерывах внешнего электроснабжения, а также для обеспечения запуска и работы автоматики собственных электростанций и электроагрегатов. В подавляющем большинстве аккумуляторных установок используются стационарные свинцово-кислотные элементы и моноблоки.
Свинцово-кислотные аккумуляторы: за и против
Преимущественное применение свинцово-кислотных аккумуляторов объясняется целым рядом их достоинств.
- Во-первых, диапазон емкостей аккумуляторов находится в пределах от единиц ампер-часов до десятков килоампер-часов, что позволяет обеспечивать комплектацию батарей любого необходимого резерва.
- Во-вторых, соотношение между конечными зарядным и разрядным напряжениями при зарядах и разрядах свинцово-кислотных аккумуляторов имеет наименьшее значение из всех электрохимических систем источников тока, что позволяет обеспечивать низкий перепад напряжения на нагрузке во всех режимах работы электропитающей установки.
- В-третьих, свинцово-кислотные аккумуляторы отличаются низкой величиной саморазряда и возможностью сохранения заряда (емкости) при длительном подзаряде.
- В-четвертых, свинцово-кислотные аккумуляторы обладают сравнительно низким внутренним сопротивлением, что обуславливает достаточную стабильность напряжения питания при динамических изменениях сопротивления нагрузки.
Вместе с тем свинцово-кислотным аккумуляторам присущи недостатки, ограничивающие сферу их применения и усложняющие организацию их эксплуатации.
Из-за низкой удельной плотности запасаемой энергии свинцово-кислотные аккумуляторы имеют достаточно большие массогабаритные параметры. Однако для стационарного применения этот показатель не имеет главенствующего значения в отличие от применения аккумуляторов для питания мобильных устройств.
Поскольку в установках свинцово-кислотных аккумуляторов происходит газообразование, для обеспечения взрывобезопасности должна быть налажена естественная или принудительная вентиляция - в зависимости от условий применения и типа аккумуляторов. По этой же причине аккумуляторные установки нельзя размещать в герметичных шкафах, отсеках и т.д.
Разряженные свинцово-кислотные аккумуляторы требуют немедленного заряда. В противном случае переход мелкокристаллического сульфата свинца на поверхности электродов в крупнокристаллическую фазу может привести к безвозвратной потере емкости аккумуляторов. В связи с этим при длительном хранении такие аккумуляторы (кроме сухозаряженных) необходимо периодически дозаряжать.
Типы аккумуляторов
По исполнению
Согласно классификации МЭК (стандарт МЭК 50 (486)-1991) свинцово-кислотные аккумуляторы выпускаются в открытом и закрытом исполнении.
Открытые аккумуляторы - это аккумуляторы, имеющие крышку с отверстием, через которое могут удаляться газообразные продукты, заливаться электролит, производиться замер плотности электролита. Отверстия могут быть снабжены системой вентиляции.
Закрытые аккумуляторы - это аккумуляторы, закрытые в обычных условиях работы, но снабженные устройствами, позволяющими выделяться газу, когда внутреннее давление превышает установленное значение. Дополнительная доливка воды в такие аккумуляторы невозможна. Эти аккумуляторы остаются закрытыми, имеют низкое газообразование при соблюдении условий эксплуатации, указанных изготовителем, и предназначены для работы в исходном герметизированном состоянии на протяжении всего срока службы. Их еще называют аккумуляторами с регулируемым клапаном, герметизированными или безуходными.
В свинцово-кислотных аккумуляторах во всех режимах их работы, в том числе и при разомкнутой цепи нагрузки (холостой ход), происходит сульфатация поверхности электродов и газообразование с расходом на эти реакции воды, входящей в состав электролита. Это вынуждает при эксплуатации обычных открытых аккумуляторов производить периодический контроль уровня и плотности электролита, доливку дистиллированной воды с проведением уравнительных зарядов, что является довольно трудоемким процессом.
В герметизированных аккумуляторах за счет применения материалов с пониженным содержанием примесей, иммобилизации электролита и других конструктивных особенностей интенсивность сульфатации и газообразования существенно снижена, что позволяет размещать такие аккумуляторы вместе с питаемым оборудованием.
По конструкции электродов
Область применения и особенности эксплуатации свинцово-кислотных аккумуляторов определяются их конструкцией. По типу конструкции положительных электродов (пластин) различают следующие типы аккумуляторов:
- с электродами большой поверхности (по классификации немецкого стандарта DIN VDE 510 - GroE);
- с панцирными (трубчатыми) положительными электродами (по классификации DIN - OPzS и OPzV);
- с намазными и стержневыми положительными электродами (по классификации DIN - Ogi).
Герметизированные аккумуляторы, как правило, имеют намазные положительные и отрицательные электроды (за исключением аккумуляторов OPzV).
Критерии выбора
При выборе типа стационарного свинцово-кислотного аккумулятора, наиболее пригодного для конкретной области применения, необходимо руководствоваться следующими критериями:
- режим разряда и отдаваемая при этом емкость;
- особенности размещения;
- особенности эксплуатации;
- срок службы;
- стоимость.
Режим разряда
При выборе аккумуляторов для определенного режима разряда следует учитывать, что при коротких режимах разряда коэффициент отдачи аккумуляторов по емкости меньше единицы. При одинаковой емкости отдача элементов с электродами большой поверхности выше в два раза, чем для элементов с панцирными электродами, и в полтора раза - чем для элементов с намазными электродами.
Стоимость
Стоимость аккумулятора зависит от его типа: как правило, аккумуляторы с электродами большой поверхности дороже панцирных, а намазные - дешевле и тех и других. Герметизированные аккумуляторы стоят больше, чем открытые.
Срок службы
Самыми долговечными при соблюдении правил эксплуатации являются аккумуляторы с электродами большой поверхности, для которых срок службы составляет 20 и более лет. Второе место по сроку службы занимают аккумуляторы с панцирными электродами - примерно 16-18 лет. Срок службы аккумуляторов с намазными электродами достигает 10-12 лет. Примерно такие же сроки эксплуатации имеют герметизированные аккумуляторы.
Однако ряд производителей выпускает герметизированные аккумуляторы и с меньшим сроком службы, но более дешевые. По классификации европейского объединения производителей аккумуляторов EUROBAT эти герметизированные аккумуляторы подразделяются на 4 класса по характеристикам и сроку службы:
- более 12 лет;
- 10-12 лет;
- 6-9 лет;
- 3-5 лет.
Аккумуляторы с короткими сроками службы, как правило, дешевле остальных и предназначены в основном для использования в качестве резервных источников тока в установках бесперебойного питания переменным током (UPS) и на временных объектах связи.
Следует учитывать, что указанные выше значения срока службы соответствуют средней температуре эксплуатации 20 °С. При увеличении температуры эксплуатации на каждые 10 °С за счет увеличения скорости электрохимических процессов в аккумуляторах их срок службы будет сокращаться в 2 раза.
Размещение
По величине занимаемой площади при эксплуатации преимущество имеют герметизированные аккумуляторы. За ними в порядке возрастания занимаемой площади следуют аккумуляторы открытых типов с намазными электродами, панцирными электродами и с электродами большой поверхности.
Размещать герметизированные аккумуляторы при эксплуатации, как правило, допускается и в вертикальном, и в горизонтальном положении - это позволяет более экономно использовать площадь под размещение электрооборудования. При горизонтальном размещении герметизированных аккумуляторов, если нет других предписаний производителя, аккумуляторы устанавливаются таким образом, чтобы пакеты электродных пластин занимали вертикальное положение.
Эксплуатация
Минимальных трудовых затрат при эксплуатации требуют герметизированные аккумуляторы. Остальные типы аккумуляторов требуют больших трудозатрат обслуживающего персонала, особенно те устройства, у которых величина примеси сурьмы в положительных решетках превышает 3%.
Качество сборки, а также укупорка соединения крышки с транспортировочной пробкой (для аккумуляторов открытых типов) или предохранительным клапаном (для герметизированных аккумуляторов) должны обеспечивать герметизацию аккумуляторов при избыточном или пониженном на 20 кПа (150 мм рт. ст.) атмосферном давлении и исключать попадание внутрь атмосферного кислорода и влаги, способных ускорять сульфатацию электродов и коррозию токосборов и борнов у сухозаряженных аккумуляторов при хранении, а также исключать выход изнутри кислоты и аэрозолей при их эксплуатации. Для герметизированных аккумуляторов, кроме того, качество укупорки должно обеспечивать нормальные условия рекомбинации кислорода и ограничивать выход газа при заданных изготовителем эксплуатационных режимах работы.
Электрические характеристики
Емкость
Основным параметром, характеризующим качество аккумулятора при заданных массогабаритных показателях, является его электрическая емкость, определяемая по числу ампер-часов электричества, получаемого при разряде аккумулятора определенным током до заданного конечного напряжения.
По классификации ГОСТ Р МЭК 896-1-95, номинальная емкость стационарного аккумулятора (С10) определяется по времени его разряда током десятичасового режима разряда до конечного напряжения 1,8 В/эл. при средней температуре электролита при разряде 20 °С. Если средняя температура электролита при разряде отличается от 20 °С, полученное значение фактической емкости (Сф) приводят к температуре 20 °С, используя формулу:
С = Сф / [1 + z(t - 20)]
где z - температурный коэффициент емкости, равный 0,006 °С-1 (для режимов разряда более часа) и 0,01 °С-1 (для режимов разряда, равных одному часу и менее); t - фактическое значение средней температуры электролита при разряде, °С.
Емкость аккумуляторов при более коротких режимах разряда меньше номинальной и при температуре электролита (20 ± 5) °С для аккумуляторов с разными типами электродов должна быть не менее указанных в таблице значений (с учетом обеспечения приемлемых пределов изменения напряжения на аппаратуре связи).
Как правило, при вводе в эксплуатацию аккумуляторов с малым сроком хранения на первом цикле разряда батарея должна отдавать не менее 95% емкости, указанной в таблице для 10-, 5-, 3- и 1-часового режимов разряда, а на 5-10-м цикле разряда (в зависимости от предписания изготовителя) -не менее 100% емкости, указанной в таблице для 10-, 5-, 3-, 1- и 0,5-часового режимов разряда.
При выборе аккумуляторов следует обращать внимание на то, при каких условиях задается изготовителем значение номинальной емкости. Если значение емкости задается при более высокой температуре, то для сравнения данного типа аккумулятора с другими необходимо предварительно пересчитать емкость на температуру 20 °С. Если значение емкости задается при более низком конечном напряжении разряда, необходимо пересчитать емкость по данным разряда аккумуляторов постоянным током, приводимую в эксплуатационной документации или рекламных данных производителя для данного режима разряда, до конечного напряжения, указанного в таблице.
Кроме того, при оценке аккумулятора следует учитывать исходное значение плотности электролита, при которой задается емкость: если исходная плотность повышена, то весьма вероятно, что срок службы аккумулятора сократится.
Пригодность к буферной работе
Другим параметром, характеризующим стационарные свинцово-кислотные аккумуляторы, является их пригодность к буферной работе. Это означает, что предварительно заряженная батарея, подключенная параллельно с нагрузкой к выпрямительным устройствам, должна сохранять свою емкость при указанном изготовителем напряжении подзаряда и заданной его нестабильности. Обычно напряжение подзаряда Uпз указывается для каждого типа аккумулятора и находится в пределах 2,18-2,27 В/эл. (при 20 °С). При эксплуатации с другими климатическими условиями следует учитывать температурный коэффициент изменения напряжения подзаряда.
Нестабильность подзарядного напряжения для основных типов аккумуляторов не должна превышать 1%, что накладывает определенные требования на выбор выпрямительных устройств при проектировании электропитающих установок связи.
При буферной работе для достижения приемлемого срока службы свинцово-кислотных аккумуляторов необходимо не превышать допустимый ток их заряда, который задается различными производителями в пределах 0,1-0,3 С10. При этом следует помнить, что ток заряда аккумуляторов с напряжением, превосходящим 2,4 В/эл., не должен превышать величину 0,05 С10.
Разброс напряжения элементов
Важным параметром, определяемым технологией изготовления аккумуляторов, является разброс напряжения отдельных элементов в составе батареи при заряде, подзаряде и разряде. Для открытых типов аккумуляторов этот параметр задается изготовителем, как правило, в пределах ± 2% от среднего значения. При коротких режимах разряда (1-часовом и менее) разброс напряжений не должен превышать +5%. Обычно для аккумуляторов с содержанием более 2% сурьмы в основе положительных электродов разброс напряжений отдельных элементов в батарее значительно ниже вышеуказанного и не приводит к осложнениям в процессе эксплуатации аккумуляторных установок.
Для аккумуляторов с меньшим содержанием сурьмы в основе положительных электродов или с безсурьмянистыми сплавами указанный разброс напряжения элементов значительно больше и в первый год после ввода в действие может составлять +10% от среднего значения с последующим снижением в процессе эксплуатации.
Отсутствие тенденции к снижению величины разброса напряжения в течение первого года после ввода в действие или увеличение разброса напряжения при последующей эксплуатации свидетельствует о дефектах устройства или о нарушении условий эксплуатации.
Особенно опасно длительное превышение напряжения на отдельных элементах в составе батареи, превышающее 2,4 В/эл., поскольку это может привести к повышенному расходу воды в отдельных элементах при заряде или подзаряде батареи и к сокращению срока ее службы или повышению трудоемкости обслуживания (для аккумуляторов открытых типов это означает более частые доливки воды). Кроме того, значительный разброс напряжения элементов в батарее может привести к потере ее емкости вследствие чрезмерно глубокого разряда отдельных элементов при разряде батареи.
Саморазряд
Качество технологии изготовления аккумуляторов оценивается также и по такой характеристике, как саморазряд.
Саморазряд (по определению ГОСТ Р МЭК 896-1-95 - сохранность заряда) определяется как процентная доля потери емкости бездействующим аккумулятором (при разомкнутой внешней цепи) при хранении в течение заданного промежутка времени при температуре 20 °С. Этот параметр определяет продолжительность хранения батареи в промежутках между очередными зарядами, а также величину подзарядного тока заряженной батареи.
Величина саморазряда в значительной степени зависит от температуры электролита, поэтому для уменьшения подзарядного тока батареи в буферном режиме ее работы или для увеличения времени хранения батареи в бездействии целесообразно выбирать помещения с пониженной средней температурой.
Обычно среднесуточный саморазряд открытых типов аккумуляторов при 90-суточном хранении при температуре 20 ° С не должен превышать 1% номинальной емкости, с ростом температуры на 10 °С это значение удваивается. Среднесуточный саморазряд герметизированных аккумуляторов при тех же условиях хранения, как правило, не должен превышать 0,1% номинальной емкости.
Внутреннее сопротивление и ток короткого замыкания
Для расчета цепей автоматики и защиты аккумуляторных батарей ГОСТ Р МЭК 896-1-95 регламентирует такие характеристики аккумуляторов как их внутреннее сопротивление и ток короткого замыкания. Эти параметры определяются расчетным путем по установившимся значениям напряжения при разряде батарей токами достаточно большой величины (обычно равными 4 С10 и 20 С10) и должны приводиться в технической документации производителя. По этим данным может быть рассчитан такой выходной динамический параметр электропитающей установки (ЭПУ), как нестабильность ее выходного напряжения при скачкообразных изменениях тока нагрузки, поскольку в буферных ЭПУ выходное сопротивление установки в основном определяется внутренним сопротивлением батареи.
Примечание:
"Бумажная" версия статьи содержит сводную таблицу характеристик аккумуляторов (стр. 126-128). Так как формат таблицы очень неудобен для размещения на сайте, здесь эта таблица не приводится.
Тематики
EN
Англо-русский словарь нормативно-технической терминологии > lead acid battery
-
9 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
10 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
11 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
12 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
13 choice device
устройство ввода альтернативы
Устройство ввода, предоставляющее одно значение из набора альтернатив.
Примечание
Таким устройством может быть функциональная клавиатура.
[ ГОСТ 27459-87]Тематики
EN
65. Устройство ввода альтернативы
Choice device
Устройство ввода, предоставляющее одно значение из набора альтернатив.
Примечание. Таким устройством может быть функциональная клавиатура
Источник: ГОСТ 27459-87: Системы обработки информации. Машинная графика. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > choice device
14 SCADA
диспетчерское управление и сбор данных
Подсистема сбора, хранения и обработки телеметрической информации, поступающей от удаленных датчиков, осуществляющих измерение температуры, давления, расхода электроэнергии и др. Сбор данных осуществляется с помощью контроллеров, программное обеспечение которых позволяет реализовать практически любой алгоритм опроса датчиков, а также обеспечить первичную обработку информации. Обмен данными часто осуществляется через интерфейс RS-485. Термин SCADA обычно употребляют, когда речь идет о контроле и регулировании каких-либо производственных процессов.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
SCADA
SCADA-система
диспетчерское управление и сбор данных
ПО, предназначенное для поддержки средств автоматизации и построения систем промышленной автоматизации.
[ http://www.morepc.ru/dict/]SCADA (аббр. от англ. supervisory control and data acquisition, диспетчерское управление и сбор данных) — программный пакет, предназначенный для разработки или обеспечения работы в реальном времени систем сбора, обработки, отображения и архивирования информации об объекте мониторинга или управления. SCADA может являться частью АСУ ТП, АСКУЭ, системы экологического мониторинга, научного эксперимента, автоматизации здания и т. д. SCADA-системы используются во всех отраслях хозяйства, где требуется обеспечивать операторский контроль за технологическими процессами в реальном времени. Данное программное обеспечение устанавливается на компьютеры и, для связи с объектом, использует драйверы ввода-вывода или OPC/DDE серверы. Программный код может быть как написан на языке программирования (например на C++), так и сгенерирован в среде проектирования.
Иногда SCADA-системы комплектуются дополнительным ПО для программирования промышленных контроллеров. Такие SCADA-системы называются интегрированными и к ним добавляют термин SoftLogic.
Термин «SCADA» имеет двоякое толкование. Наиболее широко распространено понимание SCADA как приложения[2], то есть программного комплекса, обеспечивающего выполнение указанных функций, а также инструментальных средств для разработки этого программного обеспечения. Однако, часто под SCADA-системой подразумевают программно-аппаратный комплекс. Подобное понимание термина SCADA более характерно для раздела телеметрия.
Значение термина SCADA претерпело изменения вместе с развитием технологий автоматизации и управления технологическими процессами. В 80-е годы под SCADA-системами чаще понимали программно-аппаратные комплексы сбора данных реального времени. С 90-х годов термин SCADA больше используется для обозначения только программной части человеко-машинного интерфейса АСУ ТП.Основные задачи, решаемые SCADA-системами
SCADA-системы решают следующие задачи:- Обмен данными с «устройствами связи с объектом», то есть с промышленными контроллерами и платами ввода/вывода) в реальном времени через драйверы.
- Обработка информации в реальном времени.
- Логическое управление.
- Отображение информации на экране монитора в удобной и понятной для человека форме.
- Ведение базы данных реального времени с технологической информацией.
- Аварийная сигнализация и управление тревожными сообщениями.
- Подготовка и генерирование отчетов о ходе технологического процесса.
- Осуществление сетевого взаимодействия между SCADA ПК.
- Обеспечение связи с внешними приложениями (СУБД, электронные таблицы, текстовые процессоры и т. д.). В системе управления предприятием такими приложениями чаще всего являются приложения, относимые к уровню MES.
SCADA-системы позволяют разрабатывать АСУ ТП в клиент-серверной или в распределённой архитектуре.
Основные компоненты SCADA
SCADA—система обычно содержит следующие подсистемы:- Драйверы или серверы ввода-вывода — программы, обеспечивающие связь SCADA с промышленными контроллерами, счётчиками, АЦП и другими устройствами ввода-вывода информации.
- Система реального времени — программа, обеспечивающая обработку данных в пределах заданного временного цикла с учетом приоритетов.
- Человеко-машинный интерфейс (HMI, англ. Human Machine Interface) — инструмент, который представляет данные о ходе процесса человеку оператору, что позволяет оператору контролировать процесс и управлять им. Программа-редактор для разработки человеко-машинного интерфейса.
- Система логического управления — программа, обеспечивающая исполнение пользовательских программ (скриптов) логического управления в SCADA-системе. Набор редакторов для их разработки.
- База данных реального времени — программа, обеспечивающая сохранение истории процесса в режиме реального времени.
- Система управления тревогами — программа, обеспечивающая автоматический контроль технологических событий, отнесение их к категории нормальных, предупреждающих или аварийных, а также обработку событий оператором или компьютером.
- Генератор отчетов — программа, обеспечивающая создание пользовательских отчетов о технологических событиях. Набор редакторов для их разработки.
- Внешние интерфейсы — стандартные интерфейсы обмена данными между SCADA и другими приложениями. Обычно OPC, DDE, ODBC, DLL и т. д.
Концепции систем
Термин SCADA обычно относится к централизованным системам контроля и управления всей системой, или комплексами систем, осуществляемого с участием человека. Большинство управляющих воздействий выполняется автоматически RTU или ПЛК. Непосредственное управление процессом обычно обеспечивается RTU или PLC, а SCADA управляет режимами работы. Например, PLC может управлять потоком охлаждающей воды внутри части производственного процесса, а SCADA система может позволить операторам изменять уста для потока, менять маршруты движения жидкости, заполнять те или иные ёмкости, а также следить за тревожными сообщениями (алармами), такими как — потеря потока и высокая температура, которые должны быть отображены, записаны, и на которые оператор должен своевременно реагировать. Цикл управления с обратной связью проходит через RTU или ПЛК, в то время как SCADA система контролирует полное выполнение цикла.
Сбор данных начинается в RTU или на уровне PLC и включает — показания измерительного прибора. Далее данные собираются и форматируются таким способом, чтобы оператор диспетчерской, используя HMI мог принять контролирующие решения — корректировать или прервать стандартное управление средствами RTU/ПЛК. Данные могут также быть записаны в архив для построения трендов и другой аналитической обработки накопленных данных.[ http://ru.wikipedia.org/wiki/SCADA]
CitectSCADA
полнофункциональная система мониторинга, управления и сбора данных (SCADA – Supervisory Control And Data Acquisition)
ТЕХНИЧЕСКАЯ ИНФОРМАЦИЯ:CitectSCADA построена на базе мультизадачного ядра реального времени, что обеспечивает производительность сбора до 5 000 значений в секунду при работе в сетевом режиме с несколькими станциями. Модульная клиент-серверная архитектура позволяет одинаково эффективно применять CitectSCADA как в малых проектах, с использованием только одного АРМ, так и в больших, с распределением задач на несколько компьютеров.
В отличие от других SCADA-систем среда разработки CitectSCADA поставляется бесплатно. Оплачивается только среда исполнения (runtime). Это позволяет пользователю разработать и протестировать пробный проект, не вкладывая средств на начальном этапе.
Схема лицензирования CitectSCADA основана на учете числа одновременно задействованных компьютеров в проекте, а не общего числа компьютеров, на которых установлена CitectSCADA.
CitectSCADA лицензируется на заданное количество точек (дискретных или аналоговых переменных). При этом учитываются только внешние переменные, считываемые из устройств ввода/вывода, а внутренние переменные, находящиеся в памяти или на диске, бесплатны и не входят в количество лицензируемых точек. Градация количества лицензируемых точек в CitectSCADA более равномерна, чем в других системах: 75, 150, 500, 1 500, 5 000, 15 000, 50 000 и неограниченное количество.
В CitectSCADA резервирование является встроенным и легко конфигурируемым. Резервирование позволяет защищать все зоны потенциальных отказов как функциональных модулей (серверов и клиентов), так и сетевых соединений между узлами и устройствами ввода/вывода.
CitectSCADA имеет встроенный язык программирования CiCode, а также поддержку VBA.
CitectSCADA работает как 32-разрядное приложение Windows 9X/NT/2000/XP/2003. Сбор данных, формирование алармов и построение трендов происходит одновременно с редактированием и компиляцией.
[ http://www.rtsoft.ru/catalog/soft/scada/detail/343/]
Словесный портрет современной управляющей системы типа SCADA
-
Масштабируемая
- Наращивание системы без её переконфигурирования
- Масштабы проекта не ограничены
- До 255 одновременно подключённых клиентов
- Поддержка локальных и глобальных сетей
- Возможность интеграции с веб-приложениями без конфигурирования системы
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка кластерных конфигураций
- Возможность перезапуска отдельных процессов, относящихся к разным компонентам
-
Гибкая
- Полноценная архитектура «клиент-сервер»
- Возможность масштабирования серверов/серверных массивов алармов, трендов и отчётов
- Поддержка централизованного хранения файлов проекта для удобства обслуживания, а также распределённого хранения и комбинированного варианта
- Внесение изменений на отдельных локациях
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка устоявшихся и новых стандартов
-
Надёжная
- Встроенная поддержка режима ожидания
- Резервирование файловых серверов
- Резервирование сетевых коммуникаций
- Резервирование серверов алармов
- Резервирование серверов трендов
- Резервирование серверов отчётов
- Многоуровневое резервирование ввода-вывода
- Автоматическая замена серверов
- Автоматическая синхронизация историй трендов
- Автоматическая синхронизация таблиц алармов
- Автоматическая синхронизация времени
- Защитные функции
- Автоматический перезапуск в случае сбоя системы
- Высокопроизводительная
- Безопасная
-
Коммуникационные технологии
- Поддержка открытых коммуникационных стандартов
- Поддержка каждым сервером ввода-вывода многих протоколов
- Драйверы протоколов RS-232, RS-422, RS-485, TCP/IP
- Время установки драйверов в пределах 60 секунд
- До 255 одновременно подключённых клиентов
- До 4096 устройств ввода-вывода на одну систему
- Поддержка внешнего подключения для удалённых устройств
- Средства разработки драйверов для специализированных протоколов
- Поддержка стандарта OPC Server DA2.0
- Интегрированный веб-сервис XML
- Доступ
- Неограниченное число меток
- Длина имени метки до 80 символов
- Поддержка меток качества и времени для соответствующих драйверов
- Единая база данных для контроллеров ПЛК и системы SCADA
- Двунаправленная синхронизация со средой разработки для ПЛК
- Статическая синхронизация для разработки в автономном режиме
- - Автоматические импорт и синхронизация
- Импорт из ПЛК разных типов
- Добавление пользовательских схем импорта
-
Разработка
- Неограниченное число экранов
- 24-битные цвета
- Быстрый выбор цветов по названиям
- Поддержка прозрачных цветов
- Продвинутая анимация без дополнительного программирования
- Анимация символов на базе тегов
- До 32000 анимированных изображений на страницу
- Неограниченное число мигающих цветов
- Мультиязычность
- Инструменты типа 3D Pipe
- Трёхмерные эффекты (поднятие, опускание, выдавливание)
-
Импорт графики
- Растровые изображения Windows (BMP, RLE, DIB)
- Формат AutoCAD (DXF)
- Формат Encapsulated Postscript (EPS)
- Формат Fax Image (FAX)
- Формат Ventura (IMG)
- Формат JPEG (JPG, JIF, JFF, JFE)
- Формат Photo CD (PCD)
- Формат PaintBrush (PCX)
- Формат Portable Network Graphics (PNG)
- Формат Targa (TGA)
- Формат Tagged Image Format (TIFF)
- Формат Windows Meta File (WMF)
- Формат Word Perfect Graphics (WPG)
- Неограниченное число отмен действий
- Кнопки в стиле Windows XP со свойствами динамического перемещения
- Шаблоны
- Символы
- Более 800 символов в комплекте поставки
-
Объектное конфигурирование
- Неограниченное число объектов типа «джинн» (Genie) и «суперджинн» (Super Genie)
- Пользовательские «джинны» позволяют отображать на экране пользовательское оборудование
- Пользовательские «суперджины» позволяют работать с разными устройствами через один интерфейс
- Объекты типа «джинн» и «суперджинн» способны воспринимать изменения в тегах устройств без дополнительного программирования
-
Работа
- Разрешения до 4096 x 4096
- Изменение размеров изображений (изотропное и анизотропное)
- Поддержка вывода на несколько мониторов
- Настройка скорости обновления страниц (минимум 10 мс)
- Информирование о потере связи
- Переключение языков в ходе работы
- Поддержка одно- и двухбайтовых наборов символов
-
Безопасность
- Уровень безопасности влияет на:
- Видимость объектов
- Доступ к графическим дисплеям
- Подтверждение алармов
- Создание отчётов
- Системные утилиты
-
Управление
- Сенсорные команды
- Мышь
- -Клавиатурное управление системой, страницами и анимацией
- Вертикальные и горизонтальные ползунки
- Замена БД
-
Анализ процессов
- Объединение алармов с трендами
- 32 и более перьев
- 4 и более оконных секций
- 2 и более курсоров
- Наложение перьев
- Информация о качестве данных
- Аналоговые и цифровые перья
- Информация о подтверждении алармов
- Описание алармов (аналоговых и мультицифровых)
- Комментарии к алармам
- Поддержка перехода на летнее и зимнее время
- Сохранение просмотров в процессе работы
- Хранение просмотров в удалённых локациях
- Отображение различных временных периодов на том же дисплее
- Настраиваемое и расширяемое управление
-
Алармы
- Неограниченное число алармов
- Централизованная обработка алармов
- Алармы могут быть следующих типов:
- Цифровые
- Аналоговые
- Временные метки
- Высокоуровневые выражения
- Мультицифровые
- Цифровые с временными метками
- Аналоговые с временными метками
- Изменение языка для всех алармов в процессе работы
- Подтверждение приёма в сети без дополнительного конфигурирования
- Отключение сети без дополнительного конфигурирования
- Категории, зоны и приоритеты алармов
- Задержки алармов
- Назначение временных меток с разрешением в 1 мс
- Различные данные в алармах
- Индивидуальные и групповые подтверждения
- Подтверждения на основе категорий и приоритетов
- Подтверждения отображаются графически, в списке алармов или через специализированный код:
- Сортировка алармов
- Фильтрация алармов
- Пользовательские поля алармов
-
Тренды
- Неограниченное число трендов
- До 16000 трендов на страницу
- Отображение любого тренда из истории менее чем за 1 секунду
- Файлов трендов регулируемых размеров
- Просмотр архивных трендов параллельно с актуальными в процессе работы системы
- Выбор с разрешением 1 мс
- Сравнение трендов
- Быстрый выбор трендов по тегам
- Сохранение по событию или периодическое сохранение
Статистический контроль ( SPC)
- Таблицы индексов Cp и CpK
- Контрольные карты X, R и S
- Диаграммы Парето
- Настраиваемые размеры и границы подгрупп
- Типы алармов: Above UCL, Below LCL, Outside CL, Down Trend, Up Trend, Erratic, Gradual, Down, Gradual Up, Mixture, Outside WL, Freak, Stratification и высокоуровневые выражения
- Редактор сгенерированных отчётов, редактирование по модели WYSIWYN, отчёты в формате Rich Text
- Запуск внешними событиями, по расписанию, через высокоуровневые выражения и по команде оператора
- Вывод на принтер, в файл, по электронной почте, на экран, в формат HTML
- Разработка проекта
- Масштабы проекта не ограничены
- Возможность разбиения на несколько проектов
- Удобная стандартизация проектов
- Удобное обслуживание проектов
- Встроенное средство настройки компьютеров позволяет конфигурировать каждый подключённый к сети ПК по отдельности
- Истинная вытесняющая многозадачность
- До 512 параллельных потоков
- Доступно более 600 функций SCADA
- Библиотеки для пользовательских функций
- До 2700 пользовательских функций
- Локальные, модульные и глобальные переменные
- Дополнительное программное обеспечение для создания собственных функций не требуется
- Прямой доступ к данным трендов, отчётов и алармов
- Подсвечивание синтаксиса
- Система онлайн-подсказок
- Всплывающие подсказки
- При редактировании доступны:
- Контрольные точки
- Просмотр переменных
- Мониторинг нитей
- Выделение кода цветом
- Окно контрольных точек
- Пошаговый режим выполнения
- Выделение текущей строки
- Удалённая отладка
- Автоматическая отладка в случае ошибок
- Сервер и клиент OPC
- Интерфейс ODBC
- Интерфейс OLE-DB
- Интерфейс CTAPI
- Интерфейс DLL
- Интерфейс MAPI (MAIL)
- Протоколы TCP/IP
- Последовательный интерфейс
[ http://www.rtsoft-training.ru/?p=600074]
Тематики
Синонимы
- SCADA-система
- диспетчерское управление и сбор данных
- система диспетчерского управления и сбора данных
- система мониторинга, управления и сбора данных
EN
Англо-русский словарь нормативно-технической терминологии > SCADA
15 SCADA system
SCADA
SCADA-система
диспетчерское управление и сбор данных
ПО, предназначенное для поддержки средств автоматизации и построения систем промышленной автоматизации.
[ http://www.morepc.ru/dict/]SCADA (аббр. от англ. supervisory control and data acquisition, диспетчерское управление и сбор данных) — программный пакет, предназначенный для разработки или обеспечения работы в реальном времени систем сбора, обработки, отображения и архивирования информации об объекте мониторинга или управления. SCADA может являться частью АСУ ТП, АСКУЭ, системы экологического мониторинга, научного эксперимента, автоматизации здания и т. д. SCADA-системы используются во всех отраслях хозяйства, где требуется обеспечивать операторский контроль за технологическими процессами в реальном времени. Данное программное обеспечение устанавливается на компьютеры и, для связи с объектом, использует драйверы ввода-вывода или OPC/DDE серверы. Программный код может быть как написан на языке программирования (например на C++), так и сгенерирован в среде проектирования.
Иногда SCADA-системы комплектуются дополнительным ПО для программирования промышленных контроллеров. Такие SCADA-системы называются интегрированными и к ним добавляют термин SoftLogic.
Термин «SCADA» имеет двоякое толкование. Наиболее широко распространено понимание SCADA как приложения[2], то есть программного комплекса, обеспечивающего выполнение указанных функций, а также инструментальных средств для разработки этого программного обеспечения. Однако, часто под SCADA-системой подразумевают программно-аппаратный комплекс. Подобное понимание термина SCADA более характерно для раздела телеметрия.
Значение термина SCADA претерпело изменения вместе с развитием технологий автоматизации и управления технологическими процессами. В 80-е годы под SCADA-системами чаще понимали программно-аппаратные комплексы сбора данных реального времени. С 90-х годов термин SCADA больше используется для обозначения только программной части человеко-машинного интерфейса АСУ ТП.Основные задачи, решаемые SCADA-системами
SCADA-системы решают следующие задачи:- Обмен данными с «устройствами связи с объектом», то есть с промышленными контроллерами и платами ввода/вывода) в реальном времени через драйверы.
- Обработка информации в реальном времени.
- Логическое управление.
- Отображение информации на экране монитора в удобной и понятной для человека форме.
- Ведение базы данных реального времени с технологической информацией.
- Аварийная сигнализация и управление тревожными сообщениями.
- Подготовка и генерирование отчетов о ходе технологического процесса.
- Осуществление сетевого взаимодействия между SCADA ПК.
- Обеспечение связи с внешними приложениями (СУБД, электронные таблицы, текстовые процессоры и т. д.). В системе управления предприятием такими приложениями чаще всего являются приложения, относимые к уровню MES.
SCADA-системы позволяют разрабатывать АСУ ТП в клиент-серверной или в распределённой архитектуре.
Основные компоненты SCADA
SCADA—система обычно содержит следующие подсистемы:- Драйверы или серверы ввода-вывода — программы, обеспечивающие связь SCADA с промышленными контроллерами, счётчиками, АЦП и другими устройствами ввода-вывода информации.
- Система реального времени — программа, обеспечивающая обработку данных в пределах заданного временного цикла с учетом приоритетов.
- Человеко-машинный интерфейс (HMI, англ. Human Machine Interface) — инструмент, который представляет данные о ходе процесса человеку оператору, что позволяет оператору контролировать процесс и управлять им. Программа-редактор для разработки человеко-машинного интерфейса.
- Система логического управления — программа, обеспечивающая исполнение пользовательских программ (скриптов) логического управления в SCADA-системе. Набор редакторов для их разработки.
- База данных реального времени — программа, обеспечивающая сохранение истории процесса в режиме реального времени.
- Система управления тревогами — программа, обеспечивающая автоматический контроль технологических событий, отнесение их к категории нормальных, предупреждающих или аварийных, а также обработку событий оператором или компьютером.
- Генератор отчетов — программа, обеспечивающая создание пользовательских отчетов о технологических событиях. Набор редакторов для их разработки.
- Внешние интерфейсы — стандартные интерфейсы обмена данными между SCADA и другими приложениями. Обычно OPC, DDE, ODBC, DLL и т. д.
Концепции систем
Термин SCADA обычно относится к централизованным системам контроля и управления всей системой, или комплексами систем, осуществляемого с участием человека. Большинство управляющих воздействий выполняется автоматически RTU или ПЛК. Непосредственное управление процессом обычно обеспечивается RTU или PLC, а SCADA управляет режимами работы. Например, PLC может управлять потоком охлаждающей воды внутри части производственного процесса, а SCADA система может позволить операторам изменять уста для потока, менять маршруты движения жидкости, заполнять те или иные ёмкости, а также следить за тревожными сообщениями (алармами), такими как — потеря потока и высокая температура, которые должны быть отображены, записаны, и на которые оператор должен своевременно реагировать. Цикл управления с обратной связью проходит через RTU или ПЛК, в то время как SCADA система контролирует полное выполнение цикла.
Сбор данных начинается в RTU или на уровне PLC и включает — показания измерительного прибора. Далее данные собираются и форматируются таким способом, чтобы оператор диспетчерской, используя HMI мог принять контролирующие решения — корректировать или прервать стандартное управление средствами RTU/ПЛК. Данные могут также быть записаны в архив для построения трендов и другой аналитической обработки накопленных данных.[ http://ru.wikipedia.org/wiki/SCADA]
CitectSCADA
полнофункциональная система мониторинга, управления и сбора данных (SCADA – Supervisory Control And Data Acquisition)
ТЕХНИЧЕСКАЯ ИНФОРМАЦИЯ:CitectSCADA построена на базе мультизадачного ядра реального времени, что обеспечивает производительность сбора до 5 000 значений в секунду при работе в сетевом режиме с несколькими станциями. Модульная клиент-серверная архитектура позволяет одинаково эффективно применять CitectSCADA как в малых проектах, с использованием только одного АРМ, так и в больших, с распределением задач на несколько компьютеров.
В отличие от других SCADA-систем среда разработки CitectSCADA поставляется бесплатно. Оплачивается только среда исполнения (runtime). Это позволяет пользователю разработать и протестировать пробный проект, не вкладывая средств на начальном этапе.
Схема лицензирования CitectSCADA основана на учете числа одновременно задействованных компьютеров в проекте, а не общего числа компьютеров, на которых установлена CitectSCADA.
CitectSCADA лицензируется на заданное количество точек (дискретных или аналоговых переменных). При этом учитываются только внешние переменные, считываемые из устройств ввода/вывода, а внутренние переменные, находящиеся в памяти или на диске, бесплатны и не входят в количество лицензируемых точек. Градация количества лицензируемых точек в CitectSCADA более равномерна, чем в других системах: 75, 150, 500, 1 500, 5 000, 15 000, 50 000 и неограниченное количество.
В CitectSCADA резервирование является встроенным и легко конфигурируемым. Резервирование позволяет защищать все зоны потенциальных отказов как функциональных модулей (серверов и клиентов), так и сетевых соединений между узлами и устройствами ввода/вывода.
CitectSCADA имеет встроенный язык программирования CiCode, а также поддержку VBA.
CitectSCADA работает как 32-разрядное приложение Windows 9X/NT/2000/XP/2003. Сбор данных, формирование алармов и построение трендов происходит одновременно с редактированием и компиляцией.
[ http://www.rtsoft.ru/catalog/soft/scada/detail/343/]
Словесный портрет современной управляющей системы типа SCADA
-
Масштабируемая
- Наращивание системы без её переконфигурирования
- Масштабы проекта не ограничены
- До 255 одновременно подключённых клиентов
- Поддержка локальных и глобальных сетей
- Возможность интеграции с веб-приложениями без конфигурирования системы
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка кластерных конфигураций
- Возможность перезапуска отдельных процессов, относящихся к разным компонентам
-
Гибкая
- Полноценная архитектура «клиент-сервер»
- Возможность масштабирования серверов/серверных массивов алармов, трендов и отчётов
- Поддержка централизованного хранения файлов проекта для удобства обслуживания, а также распределённого хранения и комбинированного варианта
- Внесение изменений на отдельных локациях
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка устоявшихся и новых стандартов
-
Надёжная
- Встроенная поддержка режима ожидания
- Резервирование файловых серверов
- Резервирование сетевых коммуникаций
- Резервирование серверов алармов
- Резервирование серверов трендов
- Резервирование серверов отчётов
- Многоуровневое резервирование ввода-вывода
- Автоматическая замена серверов
- Автоматическая синхронизация историй трендов
- Автоматическая синхронизация таблиц алармов
- Автоматическая синхронизация времени
- Защитные функции
- Автоматический перезапуск в случае сбоя системы
- Высокопроизводительная
- Безопасная
-
Коммуникационные технологии
- Поддержка открытых коммуникационных стандартов
- Поддержка каждым сервером ввода-вывода многих протоколов
- Драйверы протоколов RS-232, RS-422, RS-485, TCP/IP
- Время установки драйверов в пределах 60 секунд
- До 255 одновременно подключённых клиентов
- До 4096 устройств ввода-вывода на одну систему
- Поддержка внешнего подключения для удалённых устройств
- Средства разработки драйверов для специализированных протоколов
- Поддержка стандарта OPC Server DA2.0
- Интегрированный веб-сервис XML
- Доступ
- Неограниченное число меток
- Длина имени метки до 80 символов
- Поддержка меток качества и времени для соответствующих драйверов
- Единая база данных для контроллеров ПЛК и системы SCADA
- Двунаправленная синхронизация со средой разработки для ПЛК
- Статическая синхронизация для разработки в автономном режиме
- - Автоматические импорт и синхронизация
- Импорт из ПЛК разных типов
- Добавление пользовательских схем импорта
-
Разработка
- Неограниченное число экранов
- 24-битные цвета
- Быстрый выбор цветов по названиям
- Поддержка прозрачных цветов
- Продвинутая анимация без дополнительного программирования
- Анимация символов на базе тегов
- До 32000 анимированных изображений на страницу
- Неограниченное число мигающих цветов
- Мультиязычность
- Инструменты типа 3D Pipe
- Трёхмерные эффекты (поднятие, опускание, выдавливание)
-
Импорт графики
- Растровые изображения Windows (BMP, RLE, DIB)
- Формат AutoCAD (DXF)
- Формат Encapsulated Postscript (EPS)
- Формат Fax Image (FAX)
- Формат Ventura (IMG)
- Формат JPEG (JPG, JIF, JFF, JFE)
- Формат Photo CD (PCD)
- Формат PaintBrush (PCX)
- Формат Portable Network Graphics (PNG)
- Формат Targa (TGA)
- Формат Tagged Image Format (TIFF)
- Формат Windows Meta File (WMF)
- Формат Word Perfect Graphics (WPG)
- Неограниченное число отмен действий
- Кнопки в стиле Windows XP со свойствами динамического перемещения
- Шаблоны
- Символы
- Более 800 символов в комплекте поставки
-
Объектное конфигурирование
- Неограниченное число объектов типа «джинн» (Genie) и «суперджинн» (Super Genie)
- Пользовательские «джинны» позволяют отображать на экране пользовательское оборудование
- Пользовательские «суперджины» позволяют работать с разными устройствами через один интерфейс
- Объекты типа «джинн» и «суперджинн» способны воспринимать изменения в тегах устройств без дополнительного программирования
-
Работа
- Разрешения до 4096 x 4096
- Изменение размеров изображений (изотропное и анизотропное)
- Поддержка вывода на несколько мониторов
- Настройка скорости обновления страниц (минимум 10 мс)
- Информирование о потере связи
- Переключение языков в ходе работы
- Поддержка одно- и двухбайтовых наборов символов
-
Безопасность
- Уровень безопасности влияет на:
- Видимость объектов
- Доступ к графическим дисплеям
- Подтверждение алармов
- Создание отчётов
- Системные утилиты
-
Управление
- Сенсорные команды
- Мышь
- -Клавиатурное управление системой, страницами и анимацией
- Вертикальные и горизонтальные ползунки
- Замена БД
-
Анализ процессов
- Объединение алармов с трендами
- 32 и более перьев
- 4 и более оконных секций
- 2 и более курсоров
- Наложение перьев
- Информация о качестве данных
- Аналоговые и цифровые перья
- Информация о подтверждении алармов
- Описание алармов (аналоговых и мультицифровых)
- Комментарии к алармам
- Поддержка перехода на летнее и зимнее время
- Сохранение просмотров в процессе работы
- Хранение просмотров в удалённых локациях
- Отображение различных временных периодов на том же дисплее
- Настраиваемое и расширяемое управление
-
Алармы
- Неограниченное число алармов
- Централизованная обработка алармов
- Алармы могут быть следующих типов:
- Цифровые
- Аналоговые
- Временные метки
- Высокоуровневые выражения
- Мультицифровые
- Цифровые с временными метками
- Аналоговые с временными метками
- Изменение языка для всех алармов в процессе работы
- Подтверждение приёма в сети без дополнительного конфигурирования
- Отключение сети без дополнительного конфигурирования
- Категории, зоны и приоритеты алармов
- Задержки алармов
- Назначение временных меток с разрешением в 1 мс
- Различные данные в алармах
- Индивидуальные и групповые подтверждения
- Подтверждения на основе категорий и приоритетов
- Подтверждения отображаются графически, в списке алармов или через специализированный код:
- Сортировка алармов
- Фильтрация алармов
- Пользовательские поля алармов
-
Тренды
- Неограниченное число трендов
- До 16000 трендов на страницу
- Отображение любого тренда из истории менее чем за 1 секунду
- Файлов трендов регулируемых размеров
- Просмотр архивных трендов параллельно с актуальными в процессе работы системы
- Выбор с разрешением 1 мс
- Сравнение трендов
- Быстрый выбор трендов по тегам
- Сохранение по событию или периодическое сохранение
Статистический контроль ( SPC)
- Таблицы индексов Cp и CpK
- Контрольные карты X, R и S
- Диаграммы Парето
- Настраиваемые размеры и границы подгрупп
- Типы алармов: Above UCL, Below LCL, Outside CL, Down Trend, Up Trend, Erratic, Gradual, Down, Gradual Up, Mixture, Outside WL, Freak, Stratification и высокоуровневые выражения
- Редактор сгенерированных отчётов, редактирование по модели WYSIWYN, отчёты в формате Rich Text
- Запуск внешними событиями, по расписанию, через высокоуровневые выражения и по команде оператора
- Вывод на принтер, в файл, по электронной почте, на экран, в формат HTML
- Разработка проекта
- Масштабы проекта не ограничены
- Возможность разбиения на несколько проектов
- Удобная стандартизация проектов
- Удобное обслуживание проектов
- Встроенное средство настройки компьютеров позволяет конфигурировать каждый подключённый к сети ПК по отдельности
- Истинная вытесняющая многозадачность
- До 512 параллельных потоков
- Доступно более 600 функций SCADA
- Библиотеки для пользовательских функций
- До 2700 пользовательских функций
- Локальные, модульные и глобальные переменные
- Дополнительное программное обеспечение для создания собственных функций не требуется
- Прямой доступ к данным трендов, отчётов и алармов
- Подсвечивание синтаксиса
- Система онлайн-подсказок
- Всплывающие подсказки
- При редактировании доступны:
- Контрольные точки
- Просмотр переменных
- Мониторинг нитей
- Выделение кода цветом
- Окно контрольных точек
- Пошаговый режим выполнения
- Выделение текущей строки
- Удалённая отладка
- Автоматическая отладка в случае ошибок
- Сервер и клиент OPC
- Интерфейс ODBC
- Интерфейс OLE-DB
- Интерфейс CTAPI
- Интерфейс DLL
- Интерфейс MAPI (MAIL)
- Протоколы TCP/IP
- Последовательный интерфейс
[ http://www.rtsoft-training.ru/?p=600074]
Тематики
Синонимы
- SCADA-система
- диспетчерское управление и сбор данных
- система диспетчерского управления и сбора данных
- система мониторинга, управления и сбора данных
EN
Англо-русский словарь нормативно-технической терминологии > SCADA system
16 Supervisory for Control And Data Acquision
SCADA
SCADA-система
диспетчерское управление и сбор данных
ПО, предназначенное для поддержки средств автоматизации и построения систем промышленной автоматизации.
[ http://www.morepc.ru/dict/]SCADA (аббр. от англ. supervisory control and data acquisition, диспетчерское управление и сбор данных) — программный пакет, предназначенный для разработки или обеспечения работы в реальном времени систем сбора, обработки, отображения и архивирования информации об объекте мониторинга или управления. SCADA может являться частью АСУ ТП, АСКУЭ, системы экологического мониторинга, научного эксперимента, автоматизации здания и т. д. SCADA-системы используются во всех отраслях хозяйства, где требуется обеспечивать операторский контроль за технологическими процессами в реальном времени. Данное программное обеспечение устанавливается на компьютеры и, для связи с объектом, использует драйверы ввода-вывода или OPC/DDE серверы. Программный код может быть как написан на языке программирования (например на C++), так и сгенерирован в среде проектирования.
Иногда SCADA-системы комплектуются дополнительным ПО для программирования промышленных контроллеров. Такие SCADA-системы называются интегрированными и к ним добавляют термин SoftLogic.
Термин «SCADA» имеет двоякое толкование. Наиболее широко распространено понимание SCADA как приложения[2], то есть программного комплекса, обеспечивающего выполнение указанных функций, а также инструментальных средств для разработки этого программного обеспечения. Однако, часто под SCADA-системой подразумевают программно-аппаратный комплекс. Подобное понимание термина SCADA более характерно для раздела телеметрия.
Значение термина SCADA претерпело изменения вместе с развитием технологий автоматизации и управления технологическими процессами. В 80-е годы под SCADA-системами чаще понимали программно-аппаратные комплексы сбора данных реального времени. С 90-х годов термин SCADA больше используется для обозначения только программной части человеко-машинного интерфейса АСУ ТП.Основные задачи, решаемые SCADA-системами
SCADA-системы решают следующие задачи:- Обмен данными с «устройствами связи с объектом», то есть с промышленными контроллерами и платами ввода/вывода) в реальном времени через драйверы.
- Обработка информации в реальном времени.
- Логическое управление.
- Отображение информации на экране монитора в удобной и понятной для человека форме.
- Ведение базы данных реального времени с технологической информацией.
- Аварийная сигнализация и управление тревожными сообщениями.
- Подготовка и генерирование отчетов о ходе технологического процесса.
- Осуществление сетевого взаимодействия между SCADA ПК.
- Обеспечение связи с внешними приложениями (СУБД, электронные таблицы, текстовые процессоры и т. д.). В системе управления предприятием такими приложениями чаще всего являются приложения, относимые к уровню MES.
SCADA-системы позволяют разрабатывать АСУ ТП в клиент-серверной или в распределённой архитектуре.
Основные компоненты SCADA
SCADA—система обычно содержит следующие подсистемы:- Драйверы или серверы ввода-вывода — программы, обеспечивающие связь SCADA с промышленными контроллерами, счётчиками, АЦП и другими устройствами ввода-вывода информации.
- Система реального времени — программа, обеспечивающая обработку данных в пределах заданного временного цикла с учетом приоритетов.
- Человеко-машинный интерфейс (HMI, англ. Human Machine Interface) — инструмент, который представляет данные о ходе процесса человеку оператору, что позволяет оператору контролировать процесс и управлять им. Программа-редактор для разработки человеко-машинного интерфейса.
- Система логического управления — программа, обеспечивающая исполнение пользовательских программ (скриптов) логического управления в SCADA-системе. Набор редакторов для их разработки.
- База данных реального времени — программа, обеспечивающая сохранение истории процесса в режиме реального времени.
- Система управления тревогами — программа, обеспечивающая автоматический контроль технологических событий, отнесение их к категории нормальных, предупреждающих или аварийных, а также обработку событий оператором или компьютером.
- Генератор отчетов — программа, обеспечивающая создание пользовательских отчетов о технологических событиях. Набор редакторов для их разработки.
- Внешние интерфейсы — стандартные интерфейсы обмена данными между SCADA и другими приложениями. Обычно OPC, DDE, ODBC, DLL и т. д.
Концепции систем
Термин SCADA обычно относится к централизованным системам контроля и управления всей системой, или комплексами систем, осуществляемого с участием человека. Большинство управляющих воздействий выполняется автоматически RTU или ПЛК. Непосредственное управление процессом обычно обеспечивается RTU или PLC, а SCADA управляет режимами работы. Например, PLC может управлять потоком охлаждающей воды внутри части производственного процесса, а SCADA система может позволить операторам изменять уста для потока, менять маршруты движения жидкости, заполнять те или иные ёмкости, а также следить за тревожными сообщениями (алармами), такими как — потеря потока и высокая температура, которые должны быть отображены, записаны, и на которые оператор должен своевременно реагировать. Цикл управления с обратной связью проходит через RTU или ПЛК, в то время как SCADA система контролирует полное выполнение цикла.
Сбор данных начинается в RTU или на уровне PLC и включает — показания измерительного прибора. Далее данные собираются и форматируются таким способом, чтобы оператор диспетчерской, используя HMI мог принять контролирующие решения — корректировать или прервать стандартное управление средствами RTU/ПЛК. Данные могут также быть записаны в архив для построения трендов и другой аналитической обработки накопленных данных.[ http://ru.wikipedia.org/wiki/SCADA]
CitectSCADA
полнофункциональная система мониторинга, управления и сбора данных (SCADA – Supervisory Control And Data Acquisition)
ТЕХНИЧЕСКАЯ ИНФОРМАЦИЯ:CitectSCADA построена на базе мультизадачного ядра реального времени, что обеспечивает производительность сбора до 5 000 значений в секунду при работе в сетевом режиме с несколькими станциями. Модульная клиент-серверная архитектура позволяет одинаково эффективно применять CitectSCADA как в малых проектах, с использованием только одного АРМ, так и в больших, с распределением задач на несколько компьютеров.
В отличие от других SCADA-систем среда разработки CitectSCADA поставляется бесплатно. Оплачивается только среда исполнения (runtime). Это позволяет пользователю разработать и протестировать пробный проект, не вкладывая средств на начальном этапе.
Схема лицензирования CitectSCADA основана на учете числа одновременно задействованных компьютеров в проекте, а не общего числа компьютеров, на которых установлена CitectSCADA.
CitectSCADA лицензируется на заданное количество точек (дискретных или аналоговых переменных). При этом учитываются только внешние переменные, считываемые из устройств ввода/вывода, а внутренние переменные, находящиеся в памяти или на диске, бесплатны и не входят в количество лицензируемых точек. Градация количества лицензируемых точек в CitectSCADA более равномерна, чем в других системах: 75, 150, 500, 1 500, 5 000, 15 000, 50 000 и неограниченное количество.
В CitectSCADA резервирование является встроенным и легко конфигурируемым. Резервирование позволяет защищать все зоны потенциальных отказов как функциональных модулей (серверов и клиентов), так и сетевых соединений между узлами и устройствами ввода/вывода.
CitectSCADA имеет встроенный язык программирования CiCode, а также поддержку VBA.
CitectSCADA работает как 32-разрядное приложение Windows 9X/NT/2000/XP/2003. Сбор данных, формирование алармов и построение трендов происходит одновременно с редактированием и компиляцией.
[ http://www.rtsoft.ru/catalog/soft/scada/detail/343/]
Словесный портрет современной управляющей системы типа SCADA
-
Масштабируемая
- Наращивание системы без её переконфигурирования
- Масштабы проекта не ограничены
- До 255 одновременно подключённых клиентов
- Поддержка локальных и глобальных сетей
- Возможность интеграции с веб-приложениями без конфигурирования системы
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка кластерных конфигураций
- Возможность перезапуска отдельных процессов, относящихся к разным компонентам
-
Гибкая
- Полноценная архитектура «клиент-сервер»
- Возможность масштабирования серверов/серверных массивов алармов, трендов и отчётов
- Поддержка централизованного хранения файлов проекта для удобства обслуживания, а также распределённого хранения и комбинированного варианта
- Внесение изменений на отдельных локациях
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка устоявшихся и новых стандартов
-
Надёжная
- Встроенная поддержка режима ожидания
- Резервирование файловых серверов
- Резервирование сетевых коммуникаций
- Резервирование серверов алармов
- Резервирование серверов трендов
- Резервирование серверов отчётов
- Многоуровневое резервирование ввода-вывода
- Автоматическая замена серверов
- Автоматическая синхронизация историй трендов
- Автоматическая синхронизация таблиц алармов
- Автоматическая синхронизация времени
- Защитные функции
- Автоматический перезапуск в случае сбоя системы
- Высокопроизводительная
- Безопасная
-
Коммуникационные технологии
- Поддержка открытых коммуникационных стандартов
- Поддержка каждым сервером ввода-вывода многих протоколов
- Драйверы протоколов RS-232, RS-422, RS-485, TCP/IP
- Время установки драйверов в пределах 60 секунд
- До 255 одновременно подключённых клиентов
- До 4096 устройств ввода-вывода на одну систему
- Поддержка внешнего подключения для удалённых устройств
- Средства разработки драйверов для специализированных протоколов
- Поддержка стандарта OPC Server DA2.0
- Интегрированный веб-сервис XML
- Доступ
- Неограниченное число меток
- Длина имени метки до 80 символов
- Поддержка меток качества и времени для соответствующих драйверов
- Единая база данных для контроллеров ПЛК и системы SCADA
- Двунаправленная синхронизация со средой разработки для ПЛК
- Статическая синхронизация для разработки в автономном режиме
- - Автоматические импорт и синхронизация
- Импорт из ПЛК разных типов
- Добавление пользовательских схем импорта
-
Разработка
- Неограниченное число экранов
- 24-битные цвета
- Быстрый выбор цветов по названиям
- Поддержка прозрачных цветов
- Продвинутая анимация без дополнительного программирования
- Анимация символов на базе тегов
- До 32000 анимированных изображений на страницу
- Неограниченное число мигающих цветов
- Мультиязычность
- Инструменты типа 3D Pipe
- Трёхмерные эффекты (поднятие, опускание, выдавливание)
-
Импорт графики
- Растровые изображения Windows (BMP, RLE, DIB)
- Формат AutoCAD (DXF)
- Формат Encapsulated Postscript (EPS)
- Формат Fax Image (FAX)
- Формат Ventura (IMG)
- Формат JPEG (JPG, JIF, JFF, JFE)
- Формат Photo CD (PCD)
- Формат PaintBrush (PCX)
- Формат Portable Network Graphics (PNG)
- Формат Targa (TGA)
- Формат Tagged Image Format (TIFF)
- Формат Windows Meta File (WMF)
- Формат Word Perfect Graphics (WPG)
- Неограниченное число отмен действий
- Кнопки в стиле Windows XP со свойствами динамического перемещения
- Шаблоны
- Символы
- Более 800 символов в комплекте поставки
-
Объектное конфигурирование
- Неограниченное число объектов типа «джинн» (Genie) и «суперджинн» (Super Genie)
- Пользовательские «джинны» позволяют отображать на экране пользовательское оборудование
- Пользовательские «суперджины» позволяют работать с разными устройствами через один интерфейс
- Объекты типа «джинн» и «суперджинн» способны воспринимать изменения в тегах устройств без дополнительного программирования
-
Работа
- Разрешения до 4096 x 4096
- Изменение размеров изображений (изотропное и анизотропное)
- Поддержка вывода на несколько мониторов
- Настройка скорости обновления страниц (минимум 10 мс)
- Информирование о потере связи
- Переключение языков в ходе работы
- Поддержка одно- и двухбайтовых наборов символов
-
Безопасность
- Уровень безопасности влияет на:
- Видимость объектов
- Доступ к графическим дисплеям
- Подтверждение алармов
- Создание отчётов
- Системные утилиты
-
Управление
- Сенсорные команды
- Мышь
- -Клавиатурное управление системой, страницами и анимацией
- Вертикальные и горизонтальные ползунки
- Замена БД
-
Анализ процессов
- Объединение алармов с трендами
- 32 и более перьев
- 4 и более оконных секций
- 2 и более курсоров
- Наложение перьев
- Информация о качестве данных
- Аналоговые и цифровые перья
- Информация о подтверждении алармов
- Описание алармов (аналоговых и мультицифровых)
- Комментарии к алармам
- Поддержка перехода на летнее и зимнее время
- Сохранение просмотров в процессе работы
- Хранение просмотров в удалённых локациях
- Отображение различных временных периодов на том же дисплее
- Настраиваемое и расширяемое управление
-
Алармы
- Неограниченное число алармов
- Централизованная обработка алармов
- Алармы могут быть следующих типов:
- Цифровые
- Аналоговые
- Временные метки
- Высокоуровневые выражения
- Мультицифровые
- Цифровые с временными метками
- Аналоговые с временными метками
- Изменение языка для всех алармов в процессе работы
- Подтверждение приёма в сети без дополнительного конфигурирования
- Отключение сети без дополнительного конфигурирования
- Категории, зоны и приоритеты алармов
- Задержки алармов
- Назначение временных меток с разрешением в 1 мс
- Различные данные в алармах
- Индивидуальные и групповые подтверждения
- Подтверждения на основе категорий и приоритетов
- Подтверждения отображаются графически, в списке алармов или через специализированный код:
- Сортировка алармов
- Фильтрация алармов
- Пользовательские поля алармов
-
Тренды
- Неограниченное число трендов
- До 16000 трендов на страницу
- Отображение любого тренда из истории менее чем за 1 секунду
- Файлов трендов регулируемых размеров
- Просмотр архивных трендов параллельно с актуальными в процессе работы системы
- Выбор с разрешением 1 мс
- Сравнение трендов
- Быстрый выбор трендов по тегам
- Сохранение по событию или периодическое сохранение
Статистический контроль ( SPC)
- Таблицы индексов Cp и CpK
- Контрольные карты X, R и S
- Диаграммы Парето
- Настраиваемые размеры и границы подгрупп
- Типы алармов: Above UCL, Below LCL, Outside CL, Down Trend, Up Trend, Erratic, Gradual, Down, Gradual Up, Mixture, Outside WL, Freak, Stratification и высокоуровневые выражения
- Редактор сгенерированных отчётов, редактирование по модели WYSIWYN, отчёты в формате Rich Text
- Запуск внешними событиями, по расписанию, через высокоуровневые выражения и по команде оператора
- Вывод на принтер, в файл, по электронной почте, на экран, в формат HTML
- Разработка проекта
- Масштабы проекта не ограничены
- Возможность разбиения на несколько проектов
- Удобная стандартизация проектов
- Удобное обслуживание проектов
- Встроенное средство настройки компьютеров позволяет конфигурировать каждый подключённый к сети ПК по отдельности
- Истинная вытесняющая многозадачность
- До 512 параллельных потоков
- Доступно более 600 функций SCADA
- Библиотеки для пользовательских функций
- До 2700 пользовательских функций
- Локальные, модульные и глобальные переменные
- Дополнительное программное обеспечение для создания собственных функций не требуется
- Прямой доступ к данным трендов, отчётов и алармов
- Подсвечивание синтаксиса
- Система онлайн-подсказок
- Всплывающие подсказки
- При редактировании доступны:
- Контрольные точки
- Просмотр переменных
- Мониторинг нитей
- Выделение кода цветом
- Окно контрольных точек
- Пошаговый режим выполнения
- Выделение текущей строки
- Удалённая отладка
- Автоматическая отладка в случае ошибок
- Сервер и клиент OPC
- Интерфейс ODBC
- Интерфейс OLE-DB
- Интерфейс CTAPI
- Интерфейс DLL
- Интерфейс MAPI (MAIL)
- Протоколы TCP/IP
- Последовательный интерфейс
[ http://www.rtsoft-training.ru/?p=600074]
Тематики
Синонимы
- SCADA-система
- диспетчерское управление и сбор данных
- система диспетчерского управления и сбора данных
- система мониторинга, управления и сбора данных
EN
Англо-русский словарь нормативно-технической терминологии > Supervisory for Control And Data Acquision
17 field bus
полевая шина
-
[Интент]
полевая магистраль по зарубежной терминологии
Имеет много терминов-синонимов и обозначает специализированные последовательные магистрали малых локальных сетей (МЛС), ориентированны на сопряжение с ЭВМ рассредоточенных цифровых датчиков и исполнительных органов. Магистрали рассчитаны на применение в машиностроении, химической промышленности, в системах автоматизации зданий, крупных установках, бытовых электронных системах, системах автомобильного оборудования, малых контрольно-измерительных и управляющих системах на основе встраиваемых микроЭВМ и т. п. Основными магистралями являются Bitbus, MIL STD-1553В. В настоящее время рабочими группами IEC (65С и SP-50) стандартизируются два основных типа МЛС: высокоскоростные и низкоскоростные, ориентированные на датчики.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]ЧТО ТАКОЕ FIELDВUS?
Так пишется оригинальный термин, который в русском переводе звучит как «промышленная сеть». Fieldbus — это не какой-то определенный протокол передачи данных и не тип сетевой архитектуры, этот термин не принадлежит ни одной отдельно взятой компании и обозначает скорее сферу применения, чем какую-либо конкретную сетевую технологию.
Давайте попробуем сформулировать лишь некоторые основные требования, которые можно предъявить к «идеальной» промышленной сети.
1. Производительность.
2. Предсказуемость времени доставки информации.
3. Помехоустойчивость.
4. Доступность и простота организации физического канала передачи данных.
5. Максимальный сервис для приложений верхнего уровня.
6. Минимальная стоимость устройств аппаратной реализации, особенно на уровне контроллеров.
7. Возможность получения «распределенного интеллекта», путем предоставления максимального доступа к каналу нескольким ведущим узлам.
8.Управляемость и самовосстановление в случае возникновения нештатных ситуаций.
[Сергей Гусев. Краткий экскурс в историю промышленных сетей]
Международный стандарт IEC 61158 “Fieldbus for use in Industrial Control Systems” («Промышленная управляющая сеть для применения в промышленных системах управления») определяет восемь независимых и несовместимых коммуникационных технологий, из которых FOUNDATION Fieldbus H1 и PROFIBUS PA стали в значительной степени преобладающими в различных отраслях промышленности.
Эти промышленные сети соответствуют требованиям стандарта IEC 61158 2, который устанавливает физический уровень так называемых промышленных сетей H1.
Основными требованиями к промышленным сетям H1 являются:
● передача данных и питание устройств нижнего уровня по одной витой паре;
● гибкость при проектировании различных топологий сети;
● совместимость всех полевых приборов;
● взрывобезопасность при установкево взрывоопасных зонах;
● распределение одной инфраструктуры на многочисленные сегменты.[Виктор Жданкин. Концепция FieldConnex® для промышленных сетей FOUNDATION Fieldbus H1 и PROFIBUS_PA: повышение производительности и снижение затрат. СТА 2/2009]
Термин полевая шина является дословным переводом английского термина fieldbus.
Термин промышленная сеть является более точным переводом и в настоящее время именно он используется в профессиональной технической литературе.Промышленная сеть — сеть передачи данных, связывающая различные датчики, исполнительные механизмы, промышленные контроллеры и используемая в промышленной автоматизации. Термин употребляется преимущественно в автоматизированной системе управления технологическими процессами (АСУТП).
Устройства используют сеть для:
- передачи данных, между датчиками, контроллерами и исполнительными механизмами;
- диагностики и удалённого конфигурирования датчиков и исполнительных механизмов;
- калибрования датчиков;
- питания датчиков и исполнительных механизмов;
- связи между датчиками, исполнительными механизмами, ПЛК и АСУ ТП верхнего уровня.
В промышленных сетях для передачи данных применяют:
- электрические линии;
- волоконно-оптические линии;
- беспроводную связь (радиомодемы и Wi-Fi).
Промышленные сети могут взаимодействовать с обычными компьютерными сетями, в частности использовать глобальную сеть Internet.
[ Википедия]
Главной функцией полевой шины является обеспечение сетевого взаимодействия между контроллерами и удаленной периферией (например, узлами ввода/вывода). Помимо этого, к полевой шине могут подключаться различные контрольно-измерительные приборы ( Field Devices), снабженные соответствующими сетевыми интерфейсами. Такие устройства часто называют интеллектуальными ( Intelligent Field Devices), так как они поддерживают высокоуровневые протоколы сетевого обмена.
Пример полевой шины представлен на рисунке 1.
Рис. 1. Полевая шина.Как уже было отмечено, существует множество стандартов полевых шин, наиболее распространенные из которых приведены ниже:
1. Profibus DP
2. Profibus PA
3. Foundation Fieldbus
4. Modbus RTU
5. HART
6. DeviceNet
Несмотря на нюансы реализации каждого из стандартов (скорость передачи данных, формат кадра, физическая среда), у них есть одна общая черта – используемый алгоритм сетевого обмена данными, основанный на классическом принципе Master-Slave или его небольших модификациях.
Современные полевые шины удовлетворяют строгим техническим требованиям, благодаря чему становится возможной их эксплуатация в тяжелых промышленных условиях. К этим требованиям относятся:- Детерминированность. Под этим подразумевается, что передача сообщения из одного узла сети в другой занимает строго фиксированный отрезок времени. Офисные сети, построенные по технологии Ethernet, - это отличный пример недетерминированной сети. Сам алгоритм доступа к разделяемой среде по методу CSMA/CD не определяет время, за которое кадр из одного узла сети будет передан другому, и, строго говоря, нет никаких гарантий, что кадр вообще дойдет до адресата. Для промышленных сетей это недопустимо. Время передачи сообщения должно быть ограничено и в общем случае, с учетом количества узлов, скорости передачи данных и длины сообщений, может быть заранее рассчитано.
- Поддержка больших расстояний. Это существенное требование, ведь расстояние между объектами управления может порой достигать нескольких километров. Применяемый протокол должен быть ориентирован на использование в сетях большой протяженности.
- Защита от электромагнитных наводок. Длинные линии в особенности подвержены пагубному влиянию электромагнитных помех, излучаемых различными электрическими агрегатами. Сильные помехи в линии могут исказить передаваемые данные до неузнаваемости. Для защиты от таких помех применяют специальные экранированные кабели, а также оптоволокно, которое, в силу световой природы информационного сигнала, вообще нечувствительно к электромагнитным наводкам. Кроме этого, в промышленных сетях должны использоваться специальные методы цифрового кодирования данных, препятствующие их искажению в процессе передачи или, по крайней мере, позволяющие эффективно детектировать искаженные данные принимающим узлом.
- Упрочненная механическая конструкция кабелей и соединителей. Здесь тоже нет ничего удивительного, если представить, в каких условиях зачастую приходиться прокладывать коммуникационные линии. Кабели и соединители должны быть прочными, долговечными и приспособленными для использования в самых тяжелых окружающих условиях (в том числе агрессивных атмосферах).
По типу физической среды полевые шины делятся на два типа:
-
Полевые шины, построенные на базе оптоволоконного кабеля.
Преимущества использования оптоволокна очевидны: возможность построения протяженных коммуникационных линий (протяженностью до 10 км и более); большая полоса пропускания; иммунитет к электромагнитным помехам; возможность прокладки во взрывоопасных зонах.
Недостатки: относительно высокая стоимость кабеля; сложность физического подключения и соединения кабелей. Эти работы должны выполняться квалифицированными специалистами. -
Полевые шины, построенные на базе медного кабеля.
Как правило, это двухпроводной кабель типа “витая пара” со специальной изоляцией и экранированием. Преимущества: удобоваримая цена; легкость прокладки и выполнения физических соединений. Недостатки: подвержен влиянию электромагнитных наводок; ограниченная протяженность кабельных линий; меньшая по сравнению с оптоволокном полоса пропускания.
Итак, перейдем к рассмотрению методов обеспечения отказоустойчивости коммуникационных сетей, применяемых на полевом уровне. При проектировании и реализации этот аспект становится ключевым, так как в большой степени определяет характеристики надежности всей системы управления в целом.
На рисунке 2 изображена базовая архитектура полевой шины – одиночная (нерезервированная). Шина связывает контроллер С1 и четыре узла ввода/вывода IO1-IO4. Очевидно, что такая архитектура наименее отказоустойчива, так как обрыв шины, в зависимости от его локализации, ведет к потере коммуникации с одним, несколькими или всеми узлами шины. В нашем случае в результате обрыва теряется связь с двумя узлами.
Рис. 2. Нерезервированная шина.Здесь важное значение имеет термин “единичная точка отказа” (SPOF, single point of failure). Под этим понимается место в системе, отказ компонента или обрыв связи в котором приводит к нарушению работы всей системы. На рисунке 2 единичная точка отказа обозначена красным крестиком.
На рисунке 3 показана конфигурация в виде дублированной полевой шины, связывающей резервированный контроллер с узлами ввода/вывода. Каждый узел ввода/вывода снабжен двумя интерфейсными модулями. Если не считать сами модули ввода/вывода, которые резервируются редко, в данной конфигурации единичной точки отказа нет.
Рис. 3. Резервированная шина.Вообще, при построении отказоустойчивых АСУ ТП стараются, чтобы единичный отказ в любом компоненте (линии связи) не влиял на работу всей системы. В этом плане конфигурация в виде дублированной полевой шины является наиболее распространенным техническим решением.
На рисунке 4 показана конфигурация в виде оптоволоконного кольца. Контроллер и узлы ввода/вывода подключены к кольцу с помощью резервированных медных сегментов. Для состыковки медных сегментов сети с оптоволоконными применяются специальные конверторы среды передачи данных “медь<->оптоволокно” (OLM, Optical Link Module). Для каждого из стандартных протоколов можно выбрать соответствующий OLM.
Рис. 4. Одинарное оптоволоконное кольцо.Как и дублированная шина, оптоволоконное кольцо устойчиво к возникновению одного обрыва в любом его месте. Система такой обрыв вообще не заметит, и переключение на резервные интерфейсные и коммуникационные модули не произойдет. Более того, обрыв одного из двух медных сегментов, соединяющих узел с оптоволоконным кольцом, не приведет к потере связи с этим узлом. Однако второй обрыв кольца может привести к неработоспособности системы. В общем случае два обрыва кольца в диаметрально противоположных точках ведут к потере коммуникации с половиной подключенных узлов.
На рисунке 5 изображена конфигурация с двойным оптическим кольцом. В случае если в результате образования двух точек обрыва первичное кольцо выходит из строя, система переключается на вторичное кольцо. Очевидно, что такая архитектура сети является наиболее отказоустойчивой. На рисунке 5 пошагово изображен процесс деградации сети. Обратите внимание, сколько отказов система может перенести до того, как выйдет из строя.
Рис. 5. Резервированное оптоволоконное кольцо.[ http://kazanets.narod.ru/NT_PART1.htm]
Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > field bus
18 fieldbus
полевая шина
-
[Интент]
полевая магистраль по зарубежной терминологии
Имеет много терминов-синонимов и обозначает специализированные последовательные магистрали малых локальных сетей (МЛС), ориентированны на сопряжение с ЭВМ рассредоточенных цифровых датчиков и исполнительных органов. Магистрали рассчитаны на применение в машиностроении, химической промышленности, в системах автоматизации зданий, крупных установках, бытовых электронных системах, системах автомобильного оборудования, малых контрольно-измерительных и управляющих системах на основе встраиваемых микроЭВМ и т. п. Основными магистралями являются Bitbus, MIL STD-1553В. В настоящее время рабочими группами IEC (65С и SP-50) стандартизируются два основных типа МЛС: высокоскоростные и низкоскоростные, ориентированные на датчики.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]ЧТО ТАКОЕ FIELDВUS?
Так пишется оригинальный термин, который в русском переводе звучит как «промышленная сеть». Fieldbus — это не какой-то определенный протокол передачи данных и не тип сетевой архитектуры, этот термин не принадлежит ни одной отдельно взятой компании и обозначает скорее сферу применения, чем какую-либо конкретную сетевую технологию.
Давайте попробуем сформулировать лишь некоторые основные требования, которые можно предъявить к «идеальной» промышленной сети.
1. Производительность.
2. Предсказуемость времени доставки информации.
3. Помехоустойчивость.
4. Доступность и простота организации физического канала передачи данных.
5. Максимальный сервис для приложений верхнего уровня.
6. Минимальная стоимость устройств аппаратной реализации, особенно на уровне контроллеров.
7. Возможность получения «распределенного интеллекта», путем предоставления максимального доступа к каналу нескольким ведущим узлам.
8.Управляемость и самовосстановление в случае возникновения нештатных ситуаций.
[Сергей Гусев. Краткий экскурс в историю промышленных сетей]
Международный стандарт IEC 61158 “Fieldbus for use in Industrial Control Systems” («Промышленная управляющая сеть для применения в промышленных системах управления») определяет восемь независимых и несовместимых коммуникационных технологий, из которых FOUNDATION Fieldbus H1 и PROFIBUS PA стали в значительной степени преобладающими в различных отраслях промышленности.
Эти промышленные сети соответствуют требованиям стандарта IEC 61158 2, который устанавливает физический уровень так называемых промышленных сетей H1.
Основными требованиями к промышленным сетям H1 являются:
● передача данных и питание устройств нижнего уровня по одной витой паре;
● гибкость при проектировании различных топологий сети;
● совместимость всех полевых приборов;
● взрывобезопасность при установкево взрывоопасных зонах;
● распределение одной инфраструктуры на многочисленные сегменты.[Виктор Жданкин. Концепция FieldConnex® для промышленных сетей FOUNDATION Fieldbus H1 и PROFIBUS_PA: повышение производительности и снижение затрат. СТА 2/2009]
Термин полевая шина является дословным переводом английского термина fieldbus.
Термин промышленная сеть является более точным переводом и в настоящее время именно он используется в профессиональной технической литературе.Промышленная сеть — сеть передачи данных, связывающая различные датчики, исполнительные механизмы, промышленные контроллеры и используемая в промышленной автоматизации. Термин употребляется преимущественно в автоматизированной системе управления технологическими процессами (АСУТП).
Устройства используют сеть для:
- передачи данных, между датчиками, контроллерами и исполнительными механизмами;
- диагностики и удалённого конфигурирования датчиков и исполнительных механизмов;
- калибрования датчиков;
- питания датчиков и исполнительных механизмов;
- связи между датчиками, исполнительными механизмами, ПЛК и АСУ ТП верхнего уровня.
В промышленных сетях для передачи данных применяют:
- электрические линии;
- волоконно-оптические линии;
- беспроводную связь (радиомодемы и Wi-Fi).
Промышленные сети могут взаимодействовать с обычными компьютерными сетями, в частности использовать глобальную сеть Internet.
[ Википедия]
Главной функцией полевой шины является обеспечение сетевого взаимодействия между контроллерами и удаленной периферией (например, узлами ввода/вывода). Помимо этого, к полевой шине могут подключаться различные контрольно-измерительные приборы ( Field Devices), снабженные соответствующими сетевыми интерфейсами. Такие устройства часто называют интеллектуальными ( Intelligent Field Devices), так как они поддерживают высокоуровневые протоколы сетевого обмена.
Пример полевой шины представлен на рисунке 1.
Рис. 1. Полевая шина.Как уже было отмечено, существует множество стандартов полевых шин, наиболее распространенные из которых приведены ниже:
1. Profibus DP
2. Profibus PA
3. Foundation Fieldbus
4. Modbus RTU
5. HART
6. DeviceNet
Несмотря на нюансы реализации каждого из стандартов (скорость передачи данных, формат кадра, физическая среда), у них есть одна общая черта – используемый алгоритм сетевого обмена данными, основанный на классическом принципе Master-Slave или его небольших модификациях.
Современные полевые шины удовлетворяют строгим техническим требованиям, благодаря чему становится возможной их эксплуатация в тяжелых промышленных условиях. К этим требованиям относятся:- Детерминированность. Под этим подразумевается, что передача сообщения из одного узла сети в другой занимает строго фиксированный отрезок времени. Офисные сети, построенные по технологии Ethernet, - это отличный пример недетерминированной сети. Сам алгоритм доступа к разделяемой среде по методу CSMA/CD не определяет время, за которое кадр из одного узла сети будет передан другому, и, строго говоря, нет никаких гарантий, что кадр вообще дойдет до адресата. Для промышленных сетей это недопустимо. Время передачи сообщения должно быть ограничено и в общем случае, с учетом количества узлов, скорости передачи данных и длины сообщений, может быть заранее рассчитано.
- Поддержка больших расстояний. Это существенное требование, ведь расстояние между объектами управления может порой достигать нескольких километров. Применяемый протокол должен быть ориентирован на использование в сетях большой протяженности.
- Защита от электромагнитных наводок. Длинные линии в особенности подвержены пагубному влиянию электромагнитных помех, излучаемых различными электрическими агрегатами. Сильные помехи в линии могут исказить передаваемые данные до неузнаваемости. Для защиты от таких помех применяют специальные экранированные кабели, а также оптоволокно, которое, в силу световой природы информационного сигнала, вообще нечувствительно к электромагнитным наводкам. Кроме этого, в промышленных сетях должны использоваться специальные методы цифрового кодирования данных, препятствующие их искажению в процессе передачи или, по крайней мере, позволяющие эффективно детектировать искаженные данные принимающим узлом.
- Упрочненная механическая конструкция кабелей и соединителей. Здесь тоже нет ничего удивительного, если представить, в каких условиях зачастую приходиться прокладывать коммуникационные линии. Кабели и соединители должны быть прочными, долговечными и приспособленными для использования в самых тяжелых окружающих условиях (в том числе агрессивных атмосферах).
По типу физической среды полевые шины делятся на два типа:
-
Полевые шины, построенные на базе оптоволоконного кабеля.
Преимущества использования оптоволокна очевидны: возможность построения протяженных коммуникационных линий (протяженностью до 10 км и более); большая полоса пропускания; иммунитет к электромагнитным помехам; возможность прокладки во взрывоопасных зонах.
Недостатки: относительно высокая стоимость кабеля; сложность физического подключения и соединения кабелей. Эти работы должны выполняться квалифицированными специалистами. -
Полевые шины, построенные на базе медного кабеля.
Как правило, это двухпроводной кабель типа “витая пара” со специальной изоляцией и экранированием. Преимущества: удобоваримая цена; легкость прокладки и выполнения физических соединений. Недостатки: подвержен влиянию электромагнитных наводок; ограниченная протяженность кабельных линий; меньшая по сравнению с оптоволокном полоса пропускания.
Итак, перейдем к рассмотрению методов обеспечения отказоустойчивости коммуникационных сетей, применяемых на полевом уровне. При проектировании и реализации этот аспект становится ключевым, так как в большой степени определяет характеристики надежности всей системы управления в целом.
На рисунке 2 изображена базовая архитектура полевой шины – одиночная (нерезервированная). Шина связывает контроллер С1 и четыре узла ввода/вывода IO1-IO4. Очевидно, что такая архитектура наименее отказоустойчива, так как обрыв шины, в зависимости от его локализации, ведет к потере коммуникации с одним, несколькими или всеми узлами шины. В нашем случае в результате обрыва теряется связь с двумя узлами.
Рис. 2. Нерезервированная шина.Здесь важное значение имеет термин “единичная точка отказа” (SPOF, single point of failure). Под этим понимается место в системе, отказ компонента или обрыв связи в котором приводит к нарушению работы всей системы. На рисунке 2 единичная точка отказа обозначена красным крестиком.
На рисунке 3 показана конфигурация в виде дублированной полевой шины, связывающей резервированный контроллер с узлами ввода/вывода. Каждый узел ввода/вывода снабжен двумя интерфейсными модулями. Если не считать сами модули ввода/вывода, которые резервируются редко, в данной конфигурации единичной точки отказа нет.
Рис. 3. Резервированная шина.Вообще, при построении отказоустойчивых АСУ ТП стараются, чтобы единичный отказ в любом компоненте (линии связи) не влиял на работу всей системы. В этом плане конфигурация в виде дублированной полевой шины является наиболее распространенным техническим решением.
На рисунке 4 показана конфигурация в виде оптоволоконного кольца. Контроллер и узлы ввода/вывода подключены к кольцу с помощью резервированных медных сегментов. Для состыковки медных сегментов сети с оптоволоконными применяются специальные конверторы среды передачи данных “медь<->оптоволокно” (OLM, Optical Link Module). Для каждого из стандартных протоколов можно выбрать соответствующий OLM.
Рис. 4. Одинарное оптоволоконное кольцо.Как и дублированная шина, оптоволоконное кольцо устойчиво к возникновению одного обрыва в любом его месте. Система такой обрыв вообще не заметит, и переключение на резервные интерфейсные и коммуникационные модули не произойдет. Более того, обрыв одного из двух медных сегментов, соединяющих узел с оптоволоконным кольцом, не приведет к потере связи с этим узлом. Однако второй обрыв кольца может привести к неработоспособности системы. В общем случае два обрыва кольца в диаметрально противоположных точках ведут к потере коммуникации с половиной подключенных узлов.
На рисунке 5 изображена конфигурация с двойным оптическим кольцом. В случае если в результате образования двух точек обрыва первичное кольцо выходит из строя, система переключается на вторичное кольцо. Очевидно, что такая архитектура сети является наиболее отказоустойчивой. На рисунке 5 пошагово изображен процесс деградации сети. Обратите внимание, сколько отказов система может перенести до того, как выйдет из строя.
Рис. 5. Резервированное оптоволоконное кольцо.[ http://kazanets.narod.ru/NT_PART1.htm]
Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > fieldbus
19 box
̈ɪbɔks I
1. сущ.
1) полый предмет, служащий для хранения других предметов, обычно с крышкой;
его содержимое а) коробка, ящик, сундук;
какая-л. особая коробка;
сумка, вместилище;
ящичек (стола), коробочка( для всяких мелочей), шкатулка call box брит., telephone box брит. ≈ телефонная будка letter box брит., mailbox амер., pillar box брит. ≈ почтовый ящик signal box ≈ пост нейтрализации;
сигнальная будка witness box ≈ место в суде, где сидят свидетели music box амер., musical box брит. ≈ музыкальная шкатулка prompt box брит., prompter's box амер. ≈ будка суфлера shooting box ≈ охотничья сумка б) церк. дарохранительница;
дароносица в) ящик под сиденьем кучера;
перен. козлы г) урна для голосования д) почтовый ящик е) абонентский ящик ж) сейф box-man з) копилка;
скопленные деньги;
кружка с пожертвованиями и) перен. приемник-распределитель (бездомных детей и т.д.) к) рождественский подарок (упакованный в коробку) л) тех. букса м) тех. корпус;
внешняя оболочка н) австрал. смешанное стадо из разнопородного скота box of dominoes eternity box
2) переносно - нечто похожее на коробку по форме или объему, каковой обычно небольшой а) разг. ящик, телек (т.е., телевизор) ;
"гроб" (обозначение любого электронного устройства от проигрывателя до компьютера) б) домик( рыбака, охотника), халупа, избушка, вагончик;
домик для гостей (в поместье) в) диспетчерская;
домик стрелочника г) кабина телефона-автомата д) угольная вагонетка( в шахте) е) тех. корпус впускного или выпускного клапана (в двигателе внутреннего сгорания) ж) тех. салинг-блок з) рамка и) и так далее box-coupling
3) переносно - нечто похожее на коробку по функции изоляции, "отделения от окружающего пространства" а) театр. ложа;
те, кто сидят в ложе б) стойло( для лошадей, железнодорожных вагонов и т.д.) в) столик у стены в баре, отделенный от соседних перегородками по бокам г) юр. комната для совещания присяжных;
стойка или кресло, где стоит или сидит допрашиваемый свидетель (на суде) д) исповедальня е) тюремная камера ж) "место" (в спортивных играх) ∙ be in one's thinking box be in the wrong box be in a tight box be in the same box out of the box
2. гл.
1) значение связано с box I
1.
1) а) класть в ящик или коробку;
упаковывать;
запирать в сундук б) снабжать ящиком или емкостью для чего-л.;
оборудовать помещение ящиками, сундуками и т.п.
2) значение связано с box I
1. 1 м) а) вставлять в корпус;
изолировать( что-л. с помощью какой-л. оболочки) б) аккуратно помещаться в корпус, коробку, объем
3) подавать в суд см. box I
1. 3 г)
4) полигр. обрамлять, печатать в рамке
5) сильно ограничивать в свободе, создавать неудобные условия;
запирать (с кем-л. или чем-л.), заточать
6) лес. подсачивать (дерево, делая выемку в стволе, см. box I
1.
2))
7) разделять на отделения, отгораживать (также box off, см. box I
1.
3) ∙ box in box off box up box the compass II
1. сущ. этимологически слово не связано с box I
1. пощечина;
удар кулаком в ухо или в скулу (термин в разнообразных системах рукопашного боя, в т.ч. cпортивного) Gave Ralph a box on the Ear. ≈ Съездил Ральфу по уху. Syn: blow, strike, slap, cuff
2. гл. отыменной глагол, см. box II
1.
1) уст. бить, колошматить, колотить (исходное значение) ;
бить кулаком;
бить рукой (без точного указания, какой частью руки;
наиболее часто to box smb.'s ears) I've a good mind to box your ears. ≈ Давно пора надрать тебе уши. Syn: cuff II, buffet I
2) драться на кулаках, участвовать в кулачном бою;
заниматься боксом, боксировать( также to box smb.) He boxed him. ≈ Он надавал ему кулаками. box cleverly box Harry
3) (производное от третьего) наносить удар передней лапой (о зверях) III
1. сущ.;
бот.
1) бот. самшит вечнозеленый, он же самшит обыкновенный
2) древесина самшита, самшит (как материал)
2. сущ. бледный( цвета древесины самшита) коробка;
ящик;
сундук - * honey секционный мед, мед в секциях - * respirator противогаз с коробкой - * barrage( военное) огневое окаймление - * magazine( военное) коробчатый магазин - a * with pills коробка пилюль - * of matches коробка спичек содержимое коробки, ящика, сундука и т. п. - he ate a whole * of chocolates он съел целую коробку шоколада кружка (для сбора денег) (театроведение) ложа;
сидящие в ложе (особ. дамы) (редкое) тюремная камера - prisoner's * скамья подсудимых;
скамья присяжных заседателей (в зале судебного заседания;
тж. jury *) место для дачи свидетельских показаний (в зале судебного заседания;
тж. witness *) ящик под сиденьем кучера;
козлы (сленг) гроб отделенная перегородкой часть таверны, харчевни и т. п. стойло небольшой домик (охотничий и т. п.) будка (часового, сторожа и т. п.) телефонная будка рождественский подарок (в коробке;
обыкн. Christmas *) (техническое) букса;
втулка;
вкладыш( подшипника) (техническое) муфта( техническое) картер;
кожух рудничная угольная вагонетка (the *) (разговорное) "ящик", телевизор - to see smb. on the * увидеть кого-л. по телеку (американизм) (разговорное) рояль;
пианино;
(любой) струнный инструмент;
граммофон абонементный почтовый ящик большой сундук, раскрывающийся как шкаф (полиграфия) врезка( в газете - для последних сообщений и т. п.) > * of dominoes рот;
пианино, рояль > * of tricks проказник > to be in a * быть в тяжелом положении > to be in the wrong * быть в ложном /неловком/ положении;
быть не в своей тарелке > to be in the same * with smb. быть в одинаковом с кем-л. затруднительном положении > to go home in a * умереть или быть убитым > to be in one's thinking * погрузиться в размышления класть, помещать в коробку, в ящик (тж. * up, * in) ставить в стойло (лошадь и т. п.) подсачивать дерево окаймлять рамкой (военное) окружать (огнем;
тж. * in) подавать (документы) в суд (спортивное) взять бегуна в "коробочку";
зажать( бегуна) > to * the compass( морское) правильно называть все 32 румба компаса в прямом и обратном порядке;
совершать полный кругооборот;
прийти к тому, с чего начал удар (рукой или кулаком) - a * on the ear затрещина( спортивное) боксировать;
ударить( рукой или кулаком) - to * the ear дать затрещину (ботаника) пальма кавказская, самшит ( Buxus gen.) alert ~ вчт. окошко предупреждений assertion ~ вчт. вводящий блок ballot ~ избирательная урна ballot ~ тайное голосование to be in the wrong быть в неловком положении;
to be in a (tight) box быть в трудном положении;
to be in the same box быть в одинаковом положении (с кем-л.) to be in one's thinking ~ серьезно думать to be in the wrong быть в неловком положении;
to be in a (tight) box быть в трудном положении;
to be in the same box быть в одинаковом положении (с кем-л.) to be in the wrong быть в неловком положении;
to be in a (tight) box быть в трудном положении;
to be in the same box быть в одинаковом положении (с кем-л.) wrong: ~ неправда;
неправильность, ошибочность, заблуждение;
to do wrong заблуждаться;
грешить;
to be in the wrong быть неправым black ~ вчт. черный ящик box бить кулаком;
I boxed his ear я ему дал пощечину ~ вчт. блок ~ бокс ~ боксировать ~ тех. букса;
втулка;
вкладыш (подшипника) ~ графа анкеты ~ графа вопросника ~ домик (особ. охотничий) ~ запирать, класть в ящик или коробку ~ коробка, ящик, сундук (тж. эллиптически = letter box'sentry box и др.) ~ коробка ~ театр. ложа ~ маленькое отделение с перегородкой (в харчевне) ~ подавать (документ) в суд ~ лес. подсачивать (дерево) ~ рождественский подарок (обычно в ящике) ~ рудничная угольная вагонетка ~ бот. самшит вечнозеленый ~ стойло ~ (the ~) разг. телевизор ~ удар;
box on the ear пощечина ~ ящик ~ ящик под сиденьем кучера;
козлы ~ of dominoes пианино, рояль;
the eternity box разг. гроб ~ of dominoes рот ~ off отделять перегородкой ~ удар;
box on the ear пощечина to ~ the compass мор. называть все румбы компаса to ~ the compass совершить полный круг;
кончить, где начал ~ up втискивать, запихивать ~ up неумелыми действиями портить, путать дело;
вносить беспорядок cardboard ~ картонная коробка cash ~ сейф для хранения наличности check ~ вчт. окно( для) пометки, ячейка с двумя или тремя состояниями (на экране, как правило в окне диалога) Christmas ~ коробка с рождественскими подарками coin ~ копилка coin-collecting ~ копилка condition ~ вчт. блок ветвления decision ~ вчт. блок ветвления deed ~ сейф для документов deed ~ ящик для документов dialog ~ вчт. диалоговое окно dialogue ~ вчт. диалоговое окно dummy ~ выставочная витрина dummy ~ демонстрационный стенд edit ~ вчт. окно редактирования ~ of dominoes пианино, рояль;
the eternity box разг. гроб function ~ вчт. функциональный блок box бить кулаком;
I boxed his ear я ему дал пощечину in-out ~ вчт. блок ввода-вывода input ~ вчт. поле ввода jury ~ скамья присяжных letter ~ почтовый ящик list ~ вчт. окно списка mail ~ вчт. почтовый ящик mail ~ почтовый ящик night deposit ~ ночной депозитный сейф pamphlet ~ коробка для хранения брошюр pandorra ~ ящик Пандорры petty cash ~ шкатулка для хранения мелких наличных сумм post office ~ (POB) абонементный ящик post-office ~ абонементный почтовый ящик press ~ место для прессы red ~ красный кожаный ящик для официальных бумаг членов английского правительства rule ~ вчт. линейка safe deposit ~ депозитный сейф safe-deposit ~ сдаваемый в аренду сейф в хранилище ценностей банка safe-deposit ~ сейф для хранения ценностей в банке sample ~ коробка для проб shipping ~ упаковочная коробка staff suggestion ~ ящик для предложений персонала stunt ~ вчт. вспомогательный блок text ~ вчт. текстовой блок type ~ вчт. шрифтовая каретка vanity ~ = vanity bag20 sample input mode
- режим ввода в машинной графике, при котором программе доступно последнее выданное устройством значение
режим ввода в машинной графике, при котором программе доступно последнее выданное устройством значение
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > sample input mode
Страницы- 1
- 2
См. также в других словарях:
Устройство ввода чисел — 64. Устройство ввода чисел Valuator Устройство ввода, предоставляющее значение скалярной величины. Примечание. К таким устройствам относится устройство типа «колесо», потенциометр Источник: ГОСТ 27459 87: Системы обработки информации. Машинная… … Словарь-справочник терминов нормативно-технической документации
критическое значение — 2.72. критическое значение Значение, ограничивающее критическую область Источник: ГОСТ Р 50779.10 2000: Статистические методы. Вероятность и основы статистики. Термины и определения … Словарь-справочник терминов нормативно-технической документации
режим ввода в машинной графике, при котором программе доступно последнее выданное устройством значение — — [Е.С.Алексеев, А.А.Мячев. Англо русский толковый словарь по системотехнике ЭВМ. Москва 1993] Тематики информационные технологии в целом EN sample input mode … Справочник технического переводчика
устройство ввода альтернативы — Устройство ввода, предоставляющее одно значение из набора альтернатив. Примечание Таким устройством может быть функциональная клавиатура. [ГОСТ 27459 87] Тематики машинная графика EN choice device … Справочник технического переводчика
устройство ввода чисел — Устройство ввода, предоставляющее значение скалярной величины. Примечание К таким устройствам относится устройство типа "колесо", потенциометр [ГОСТ 27459 87] Тематики машинная графика EN valuator … Справочник технического переводчика
устройство ввода чисел, скалярных величин (в интерактивной графике) — Устройство ввода, представляющее значение скалярной величины. К таким устройствам относят устройство типа «колесо», потенциометр. Реализуется также в виде клавиатуры, в виде линейки на экране дисплея, на которой курсором указывается позиция, или… … Справочник технического переводчика
Устройство ввода альтернативы — 65. Устройство ввода альтернативы Choice device Устройство ввода, предоставляющее одно значение из набора альтернатив. Примечание. Таким устройством может быть функциональная клавиатура Источник: ГОСТ 27459 87: Системы обработки информации.… … Словарь-справочник терминов нормативно-технической документации
критическое значение критерия отказа — 3.9. критическое значение критерия отказа: Предельное значение критерия отказа, при котором изделие, система материалов, покрытия, материал еще удовлетворяют предъявленным к нему требованиям в условиях эксплуатации, хранения до ввода в… … Словарь-справочник терминов нормативно-технической документации
номинальный угол ввода — 2.5.14 номинальный угол ввода: Установленное номинальное значение угла преломления преобразователя для заданного материала и температуры. Источник: ГОСТ Р ИСО 5577 2009: Контроль неразрушающий. Ультразвуковой контроль. Словарь … Словарь-справочник терминов нормативно-технической документации
устройство — 2.5 устройство: Элемент или блок элементов, который выполняет одну или более функцию. Источник: ГОСТ Р 52388 2005: Мототранспортны … Словарь-справочник терминов нормативно-технической документации
ГОСТ 28668-90 Э: Низковольтные комплектные устройства распределения и управления. Часть 1. Требования к устройствам, испытанным полностью или частично — Терминология ГОСТ 28668 90 Э: Низковольтные комплектные устройства распределения и управления. Часть 1. Требования к устройствам, испытанным полностью или частично оригинал документа: 7.7. Внутреннее разделение НКУ ограждениями или перегородками… … Словарь-справочник терминов нормативно-технической документации
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с английского на русский
с русского на английский- С русского на:
- Английский
- С английского на:
- Русский